 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging Tactile Sensors for Low Latency Embedded Smart Hands for Prosthetic and Robotic Applications
Paper and Code
Mar 28, 2022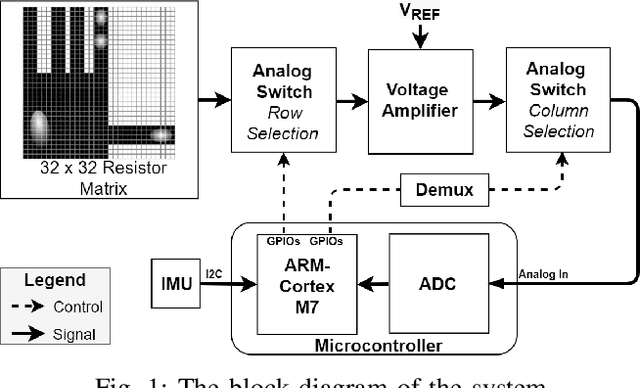
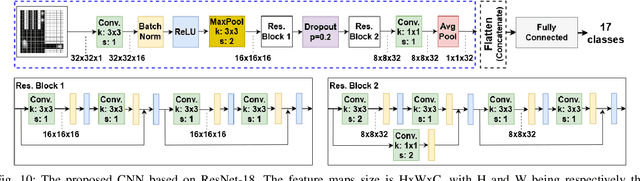
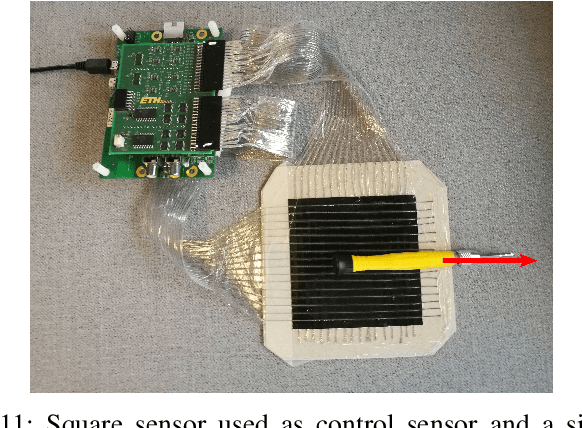
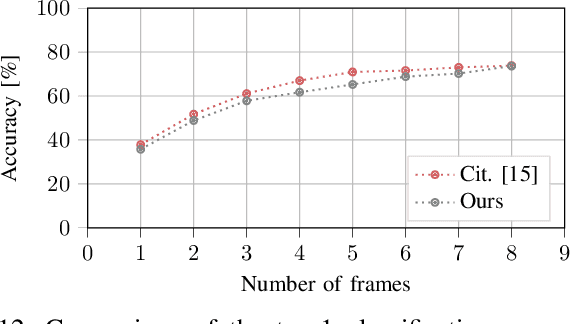
Tactile sensing is a crucial perception mode for robots and human amputees in need of controlling a prosthetic device. Today robotic and prosthetic systems are still missing the important feature of accurate tactile sensing. This lack is mainly due to the fact that the existing tactile technologies have limited spatial and temporal resolution and are either expensive or not scalable. In this paper, we present the design and the implementation of a hardware-software embedded system called SmartHand. It is specifically designed to enable the acquisition and the real-time processing of high-resolution tactile information from a hand-shaped multi-sensor array for prosthetic and robotic applications. During data collection, our system can deliver a high throughput of 100 frames per second, which is 13.7x higher than previous related work. We collected a new tactile dataset while interacting with daily-life objects during five different sessions. We propose a compact yet accurate convolutional neural network that requires one order of magnitude less memory and 15.6x fewer computations compared to related work without degrading classification accuracy. The top-1 and top-3 cross-validation accuracies are respectively 98.86% and 99.83%. We further analyze the inter-session variability and obtain the best top-3 leave-one-out-validation accuracy of 77.84%. We deploy the trained model on a high-performance ARM Cortex-M7 microcontroller achieving an inference time of only 100 ms minimizing the response latency. The overall measured power consumption is 505 mW. Finally, we fabricate a new control sensor and perform additional experiments to provide analyses on sensor degradation and slip detection. This work is a step forward in giving robotic and prosthetic devices a sense of touch and demonstrates the practicality of a smart embedded system empowered by tiny machine learning.