 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging Cloud Computing to Make Autonomous Vehicles Safer
Paper and Code
Aug 06, 2023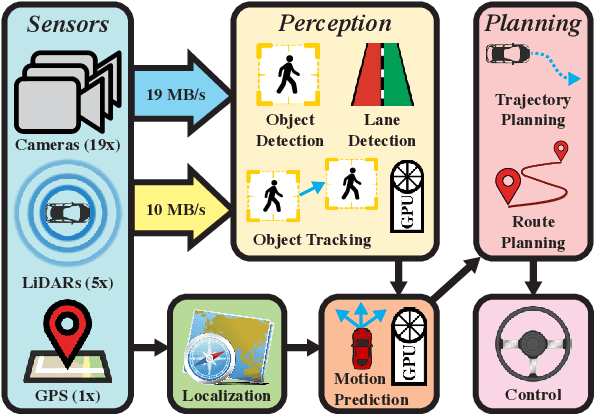
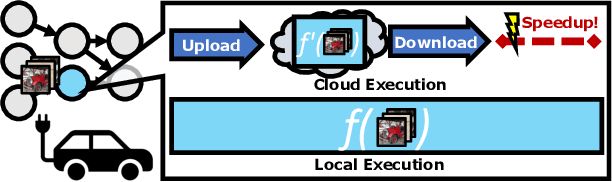
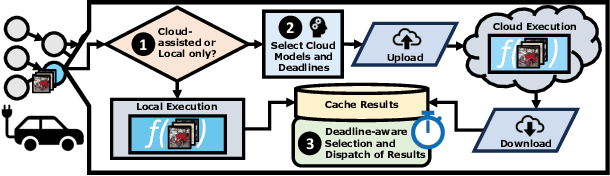
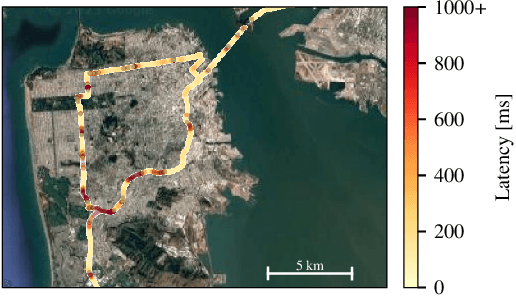
The safety of autonomous vehicles (AVs) depends on their ability to perform complex computations on high-volume sensor data in a timely manner. Their ability to run these computations with state-of-the-art models is limited by the processing power and slow update cycles of their onboard hardware. In contrast, cloud computing offers the ability to burst computation to vast amounts of the latest generation of hardware. However, accessing these cloud resources requires traversing wireless networks that are often considered to be too unreliable for real-time AV driving applications. Our work seeks to harness this unreliable cloud to enhance the accuracy of an AV's decisions, while ensuring that it can always fall back to its on-board computational capabilities. We identify three mechanisms that can be used by AVs to safely leverage the cloud for accuracy enhancements, and elaborate why current execution systems fail to enable these mechanisms. To address these limitations, we provide a system design based on the speculative execution of an AV's pipeline in the cloud, and show the efficacy of this approach in simulations of complex real-world scenarios that apply these mechanisms.