 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLet's Take This Online: Adapting Scene Coordinate Regression Network Predictions for Online RGB-D Camera Relocalisation
Paper and Code
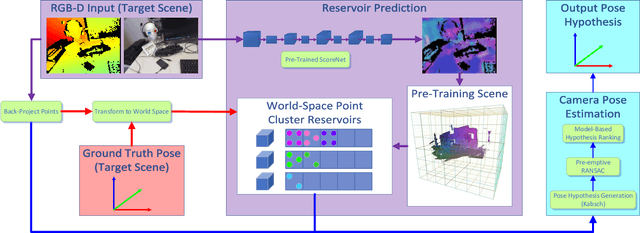
Many applications require a camera to be relocalised online, without expensive offline training on the target scene. Whilst both keyframe and sparse keypoint matching methods can be used online, the former often fail away from the training trajectory, and the latter can struggle in textureless regions. By contrast, scene coordinate regression (SCoRe) methods generalise to novel poses and can leverage dense correspondences to improve robustness, and recent work has shown how to adapt SCoRe forests between scenes, allowing their state-of-the-art performance to be leveraged online. However, because they use features hand-crafted for indoor use, they do not generalise well to harder outdoor scenes. Whilst replacing the forest with a neural network and learning suitable features for outdoor use is possible, the techniques used to adapt forests between scenes are unfortunately harder to transfer to a network context. In this paper, we address this by proposing a novel way of leveraging a network trained on one scene to predict points in another scene. Our approach replaces the appearance clustering performed by the branching structure of a regression forest with a two-step process that first uses the network to predict points in the original scene, and then uses these predicted points to look up clusters of points from the new scene. We show experimentally that our online approach achieves state-of-the-art performance on both the 7-Scenes and Cambridge Landmarks datasets, whilst running in under 300ms, making it highly effective in live scenarios.