 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Zero-Sum Linear Quadratic Games with Improved Sample Complexity
Paper and Code
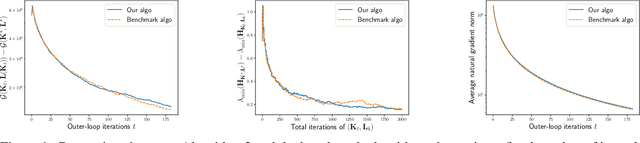
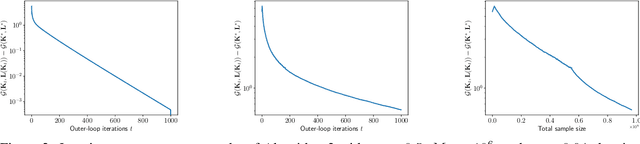
Zero-sum Linear Quadratic (LQ) games are fundamental in optimal control and can be used (i) as a dynamic game formulation for risk-sensitive or robust control, or (ii) as a benchmark setting for multi-agent reinforcement learning with two competing agents in continuous state-control spaces. In contrast to the well-studied single-agent linear quadratic regulator problem, zero-sum LQ games entail solving a challenging nonconvex-nonconcave min-max problem with an objective function that lacks coercivity. Recently, Zhang et al. discovered an implicit regularization property of natural policy gradient methods which is crucial for safety-critical control systems since it preserves the robustness of the controller during learning. Moreover, in the model-free setting where the knowledge of model parameters is not available, Zhang et al. proposed the first polynomial sample complexity algorithm to reach an $\epsilon$-neighborhood of the Nash equilibrium while maintaining the desirable implicit regularization property. In this work, we propose a simpler nested Zeroth-Order (ZO) algorithm improving sample complexity by several orders of magnitude. Our main result guarantees a $\widetilde{\mathcal{O}}(\epsilon^{-3})$ sample complexity under the same assumptions using a single-point ZO estimator. Furthermore, when the estimator is replaced by a two-point estimator, our method enjoys a better $\widetilde{\mathcal{O}}(\epsilon^{-2})$ sample complexity. Our key improvements rely on a more sample-efficient nested algorithm design and finer control of the ZO natural gradient estimation error.