 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Switch CNNs with Model Agnostic Meta Learning for Fine Precision Visual Servoing
Paper and Code
Jul 09, 2020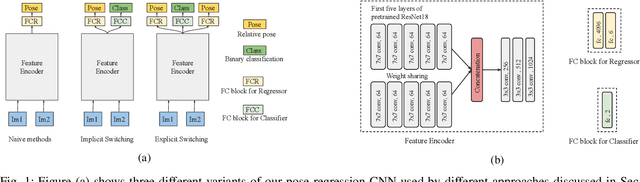
Convolutional Neural Networks (CNNs) have been successfully applied for relative camera pose estimation from labeled image-pair data, without requiring any hand-engineered features, camera intrinsic parameters or depth information. The trained CNN can be utilized for performing pose based visual servo control (PBVS). One of the ways to improve the quality of visual servo output is to improve the accuracy of the CNN for estimating the relative pose estimation. With a given state-of-the-art CNN for relative pose regression, how can we achieve an improved performance for visual servo control? In this paper, we explore switching of CNNs to improve the precision of visual servo control. The idea of switching a CNN is due to the fact that the dataset for training a relative camera pose regressor for visual servo control must contain variations in relative pose ranging from a very small scale to eventually a larger scale. We found that, training two different instances of the CNN, one for large-scale-displacements (LSD) and another for small-scale-displacements (SSD) and switching them during the visual servo execution yields better results than training a single CNN with the combined LSD+SSD data. However, it causes extra storage overhead and switching decision is taken by a manually set threshold which may not be optimal for all the scenes. To eliminate these drawbacks, we propose an efficient switching strategy based on model agnostic meta learning (MAML) algorithm. In this, a single model is trained to learn parameters which are simultaneously good for multiple tasks, namely a binary classification for switching decision, a 6DOF pose regression for LSD data and also a 6DOF pose regression for SSD data. The proposed approach performs far better than the naive approach, while storage and run-time overheads are almost negligible.