 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Register Unbalanced Point Pairs
Paper and Code
Jul 09, 2022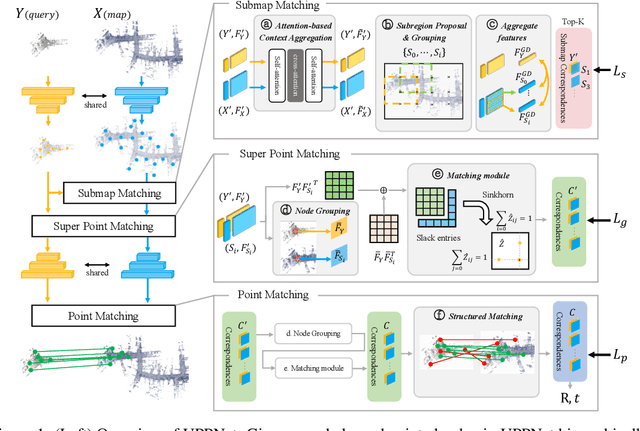
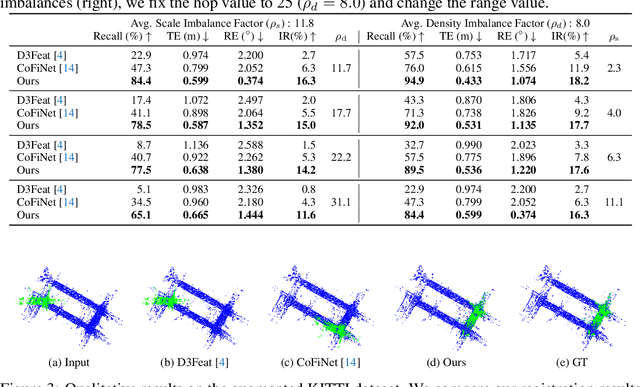

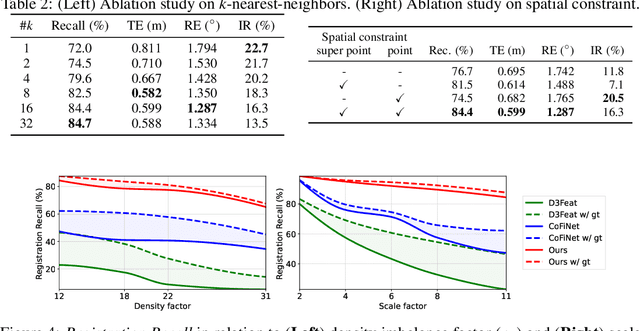
Recent 3D registration methods can effectively handle large-scale or partially overlapping point pairs. However, despite its practicality, matching the unbalanced pairs in terms of spatial scale and density has been overlooked. We present a novel 3D registration method, called UPPNet, for the unbalanced point pairs. We propose a hierarchical framework to find inlier correspondences effectively by gradually reducing search space. Our method predicts the subregions of the target points likely to be overlapped with the query points. The following super-point matching module and fine-grained refinement module estimate accurate inlier correspondences between two point clouds. Furthermore, we apply geometric constraints to refine the correspondences that satisfy spatial compatibility. Correspondence prediction is trained end-to-end, and our approach can predict the proper rigid transformation with a single forward pass given unbalanced point cloud pairs. To validate the efficacy of the proposed method, we create a KITTI-UPP dataset by augmenting the KITTI LiDAR dataset. Experiments on this dataset reveal that the proposed approach significantly outperforms state-of-the-art pairwise point cloud registration methods by a large margin, resulting in 78% improvement in Registration Recall when the target point cloud is about 10$\times$ spatially larger and about 10$\times$ times denser than the query point cloud.