 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Interrupt: A Hierarchical Deep Reinforcement Learning Framework for Efficient Exploration
Paper and Code
Jul 30, 2018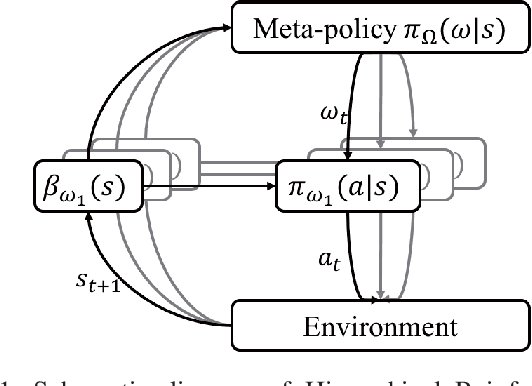
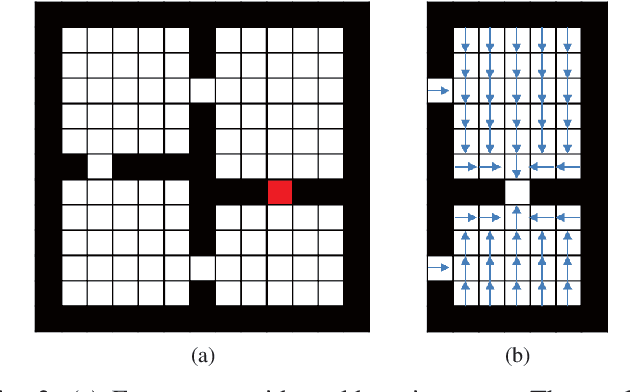
To achieve scenario intelligence, humans must transfer knowledge to robots by developing goal-oriented algorithms, which are sometimes insensitive to dynamically changing environments. While deep reinforcement learning achieves significant success recently, it is still extremely difficult to be deployed in real robots directly. In this paper, we propose a hybrid structure named Option-Interruption in which human knowledge is embedded into a hierarchical reinforcement learning framework. Our architecture has two key components: options, represented by existing human-designed methods, can significantly speed up the training process and interruption mechanism, based on learnable termination functions, enables our system to quickly respond to the external environment. To implement this architecture, we derive a set of update rules based on policy gradient methods and present a complete training process. In the experiment part, our method is evaluated in Four-room navigation and exploration task, which shows the efficiency and flexibility of our framework.