 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Infer Kinematic Hierarchies for Novel Object Instances
Paper and Code
Oct 15, 2021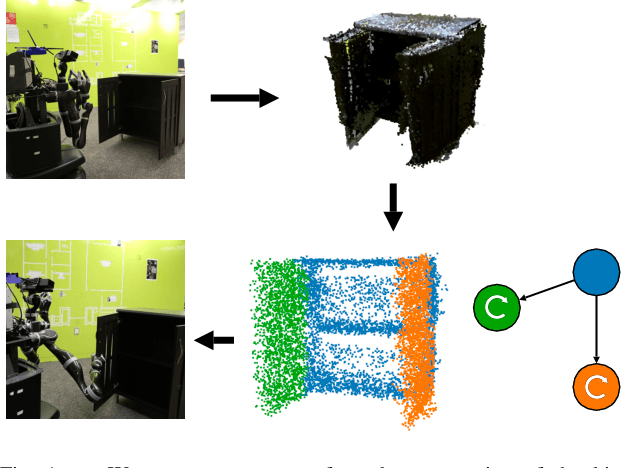
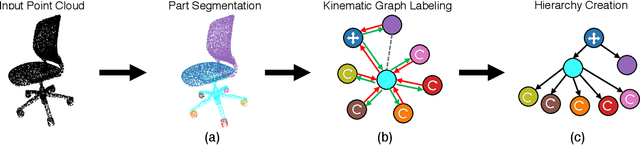
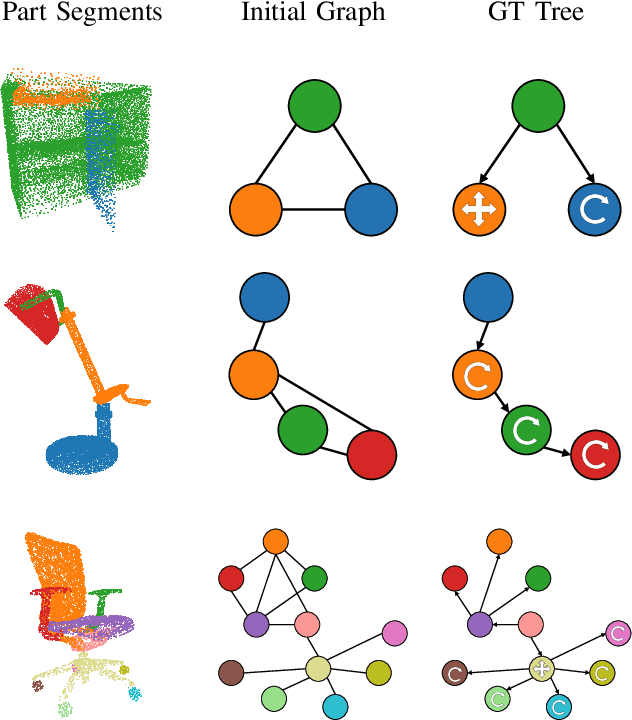
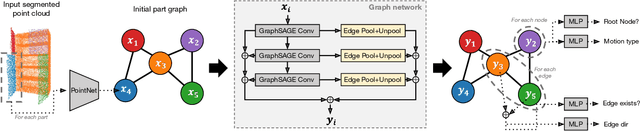
Manipulating an articulated object requires perceiving itskinematic hierarchy: its parts, how each can move, and howthose motions are coupled. Previous work has explored per-ception for kinematics, but none infers a complete kinematichierarchy on never-before-seen object instances, without relyingon a schema or template. We present a novel perception systemthat achieves this goal. Our system infers the moving parts ofan object and the kinematic couplings that relate them. Toinfer parts, it uses a point cloud instance segmentation neuralnetwork and to infer kinematic hierarchies, it uses a graphneural network to predict the existence, direction, and typeof edges (i.e. joints) that relate the inferred parts. We trainthese networks using simulated scans of synthetic 3D models.We evaluate our system on simulated scans of 3D objects, andwe demonstrate a proof-of-concept use of our system to drivereal-world robotic manipulation.