 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Identify Object Instances by Touch: Tactile Recognition via Multimodal Matching
Paper and Code
Mar 08, 2019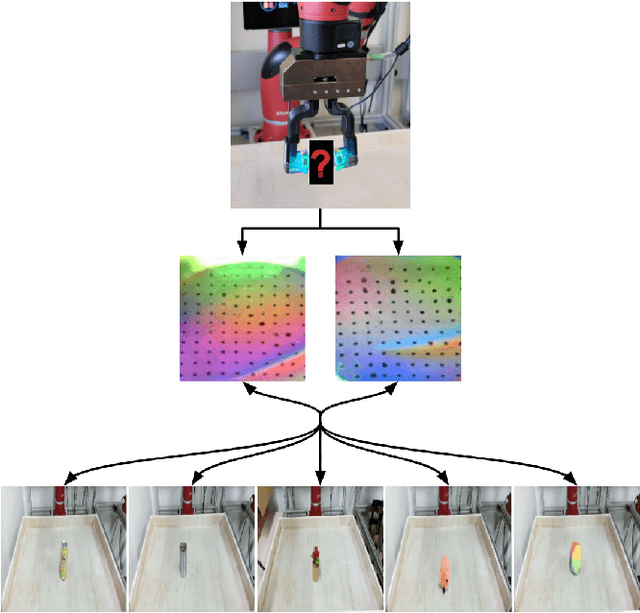
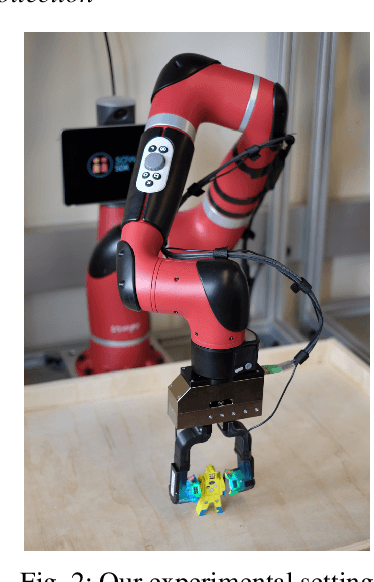
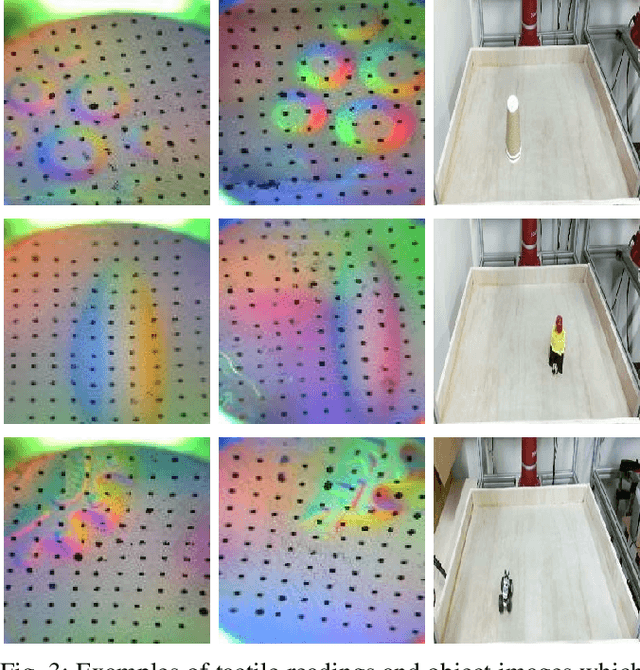
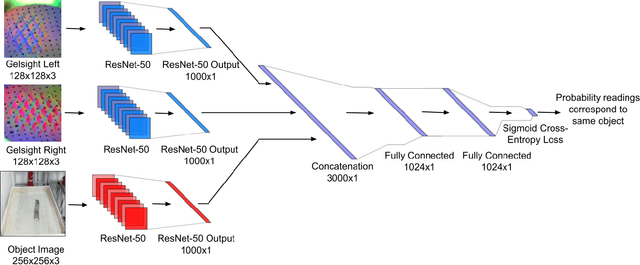
Much of the literature on robotic perception focuses on the visual modality. Vision provides a global observation of a scene, making it broadly useful. However, in the domain of robotic manipulation, vision alone can sometimes prove inadequate: in the presence of occlusions or poor lighting, visual object identification might be difficult. The sense of touch can provide robots with an alternative mechanism for recognizing objects. In this paper, we study the problem of touch-based instance recognition. We propose a novel framing of the problem as multi-modal recognition: the goal of our system is to recognize, given a visual and tactile observation, whether or not these observations correspond to the same object. To our knowledge, our work is the first to address this type of multi-modal instance recognition problem on such a large-scale with our analysis spanning 98 different objects. We employ a robot equipped with two GelSight touch sensors, one on each finger, and a self-supervised, autonomous data collection procedure to collect a dataset of tactile observations and images. Our experimental results show that it is possible to accurately recognize object instances by touch alone, including instances of novel objects that were never seen during training. Our learned model outperforms other methods on this complex task, including that of human volunteers.