 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Drive Off Road on Smooth Terrain in Unstructured Environments Using an On-Board Camera and Sparse Aerial Images
Paper and Code
Apr 09, 2020


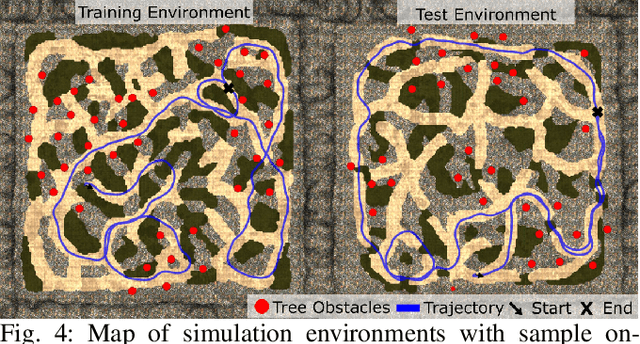
We present a method for learning to drive on smooth terrain while simultaneously avoiding collisions in challenging off-road and unstructured outdoor environments using only visual inputs. Our approach applies a hybrid model-based and model-free reinforcement learning method that is entirely self-supervised in labeling terrain roughness and collisions using on-board sensors. Notably, we provide both first-person and overhead aerial image inputs to our model. We find that the fusion of these complementary inputs improves planning foresight and makes the model robust to visual obstructions. Our results show the ability to generalize to environments with plentiful vegetation, various types of rock, and sandy trails. During evaluation, our policy attained 90% smooth terrain traversal and reduced the proportion of rough terrain driven over by 6.1 times compared to a model using only first-person imagery.