Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Stable and Energetically Economical Walking with RAMone
Paper and Code
Nov 03, 2017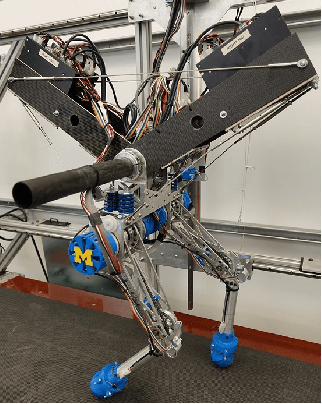
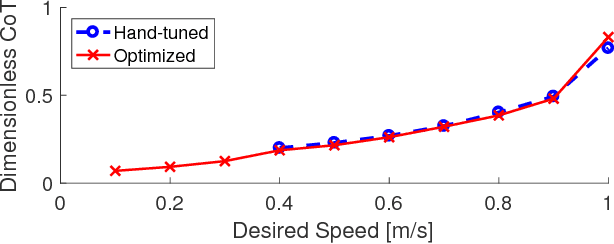
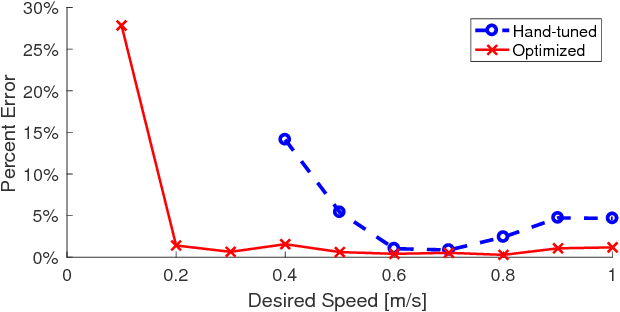
In this paper, we optimize over the control parameter space of our planar-bipedal robot, RAMone, for stable and energetically economical walking at various speeds. We formulate this task as an episodic reinforcement learning problem and use Covariance Matrix Adaptation. The parameters we are interested in modifying include gains from our Hybrid Zero Dynamics style controller and from RAMone's low-level motor controllers.
View paper on