 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Remote Sensing Object Detection with Single Point Supervision
Paper and Code
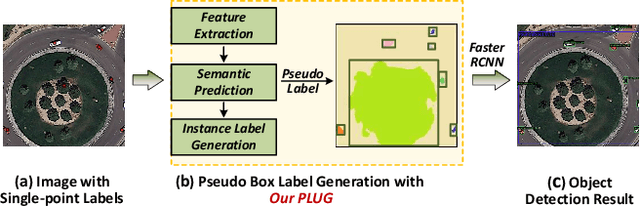
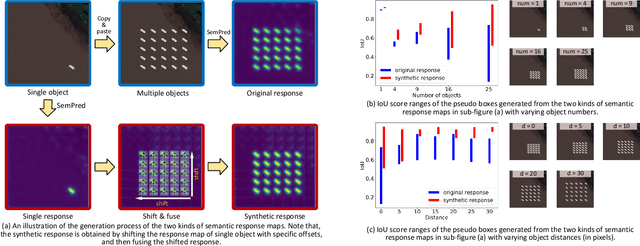
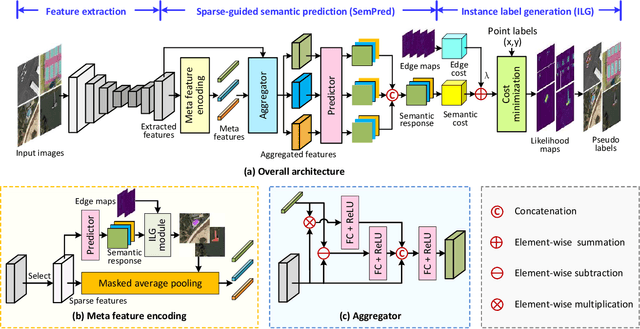

Pointly Supervised Object Detection (PSOD) has attracted considerable interests due to its lower labeling cost as compared to box-level supervised object detection. However, the complex scenes, densely packed and dynamic-scale objects in Remote Sensing (RS) images hinder the development of PSOD methods in RS field. In this paper, we make the first attempt to achieve RS object detection with single point supervision, and propose a PSOD framework tailored with RS images. Specifically, we design a point label upgrader (PLUG) to generate pseudo box labels from single point labels, and then use the pseudo boxes to supervise the optimization of existing detectors. Moreover, to handle the challenge of the densely packed objects in RS images, we propose a sparse feature guided semantic prediction module which can generate high-quality semantic maps by fully exploiting informative cues from sparse objects. Extensive ablation studies on the DOTA dataset have validated the effectiveness of our method. Our method can achieve significantly better performance as compared to state-of-the-art image-level and point-level supervised detection methods, and reduce the performance gap between PSOD and box-level supervised object detection. Code will be available at https://github.com/heshitian/PLUG.