 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Real-world Autonomous Navigation by Self-Supervised Environment Synthesis
Paper and Code
Oct 10, 2022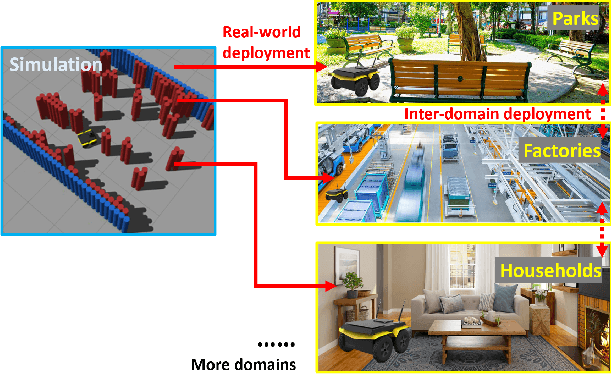
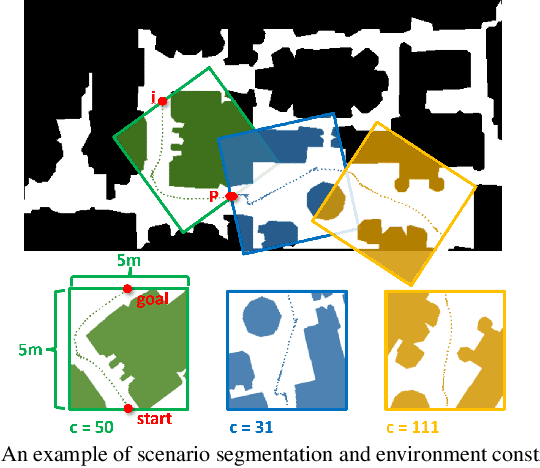
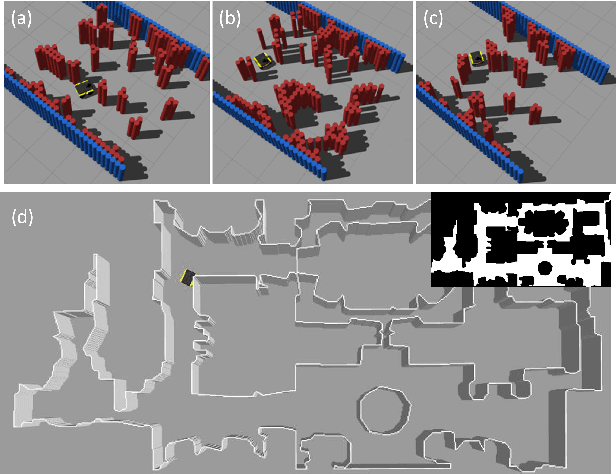

Machine learning approaches have recently enabled autonomous navigation for mobile robots in a data-driven manner. Since most existing learning-based navigation systems are trained with data generated in artificially created training environments, during real-world deployment at scale, it is inevitable that robots will encounter unseen scenarios, which are out of the training distribution and therefore lead to poor real-world performance. On the other hand, directly training in the real world is generally unsafe and inefficient. To address this issue, we introduce Self-supervised Environment Synthesis (SES), in which, after real-world deployment with safety and efficiency requirements, autonomous mobile robots can utilize experience from the real-world deployment, reconstruct navigation scenarios, and synthesize representative training environments in simulation. Training in these synthesized environments leads to improved future performance in the real world. The effectiveness of SES at synthesizing representative simulation environments and improving real-world navigation performance is evaluated via a large-scale deployment in a high-fidelity, realistic simulator and a small-scale deployment on a physical robot.