 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Rank Reduced Interpolation with Principal Component Analysis
Paper and Code
Mar 15, 2017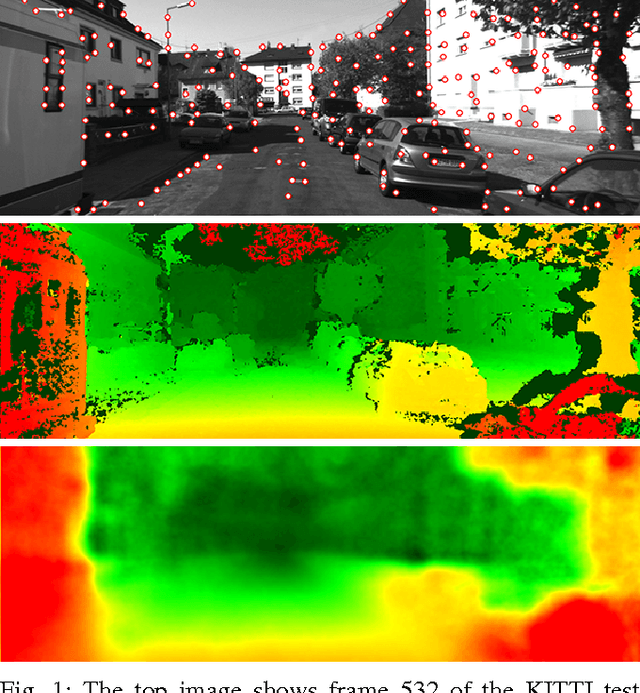

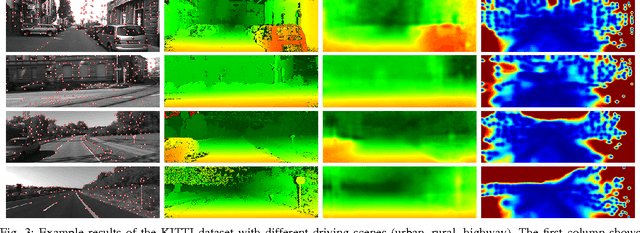

In computer vision most iterative optimization algorithms, both sparse and dense, rely on a coarse and reliable dense initialization to bootstrap their optimization procedure. For example, dense optical flow algorithms profit massively in speed and robustness if they are initialized well in the basin of convergence of the used loss function. The same holds true for methods as sparse feature tracking when initial flow or depth information for new features at arbitrary positions is needed. This makes it extremely important to have techniques at hand that allow to obtain from only very few available measurements a dense but still approximative sketch of a desired 2D structure (e.g. depth maps, optical flow, disparity maps, etc.). The 2D map is regarded as sample from a 2D random process. The method presented here exploits the complete information given by the principal component analysis (PCA) of that process, the principal basis and its prior distribution. The method is able to determine a dense reconstruction from sparse measurement. When facing situations with only very sparse measurements, typically the number of principal components is further reduced which results in a loss of expressiveness of the basis. We overcome this problem and inject prior knowledge in a maximum a posterior (MAP) approach. We test our approach on the KITTI and the virtual KITTI datasets and focus on the interpolation of depth maps for driving scenes. The evaluation of the results show good agreement to the ground truth and are clearly better than results of interpolation by the nearest neighbor method which disregards statistical information.