 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Probabilistic Hierarchical Task Networks to Capture User Preferences
Paper and Code
Jun 02, 2010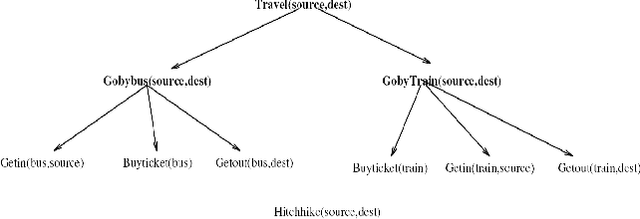



We propose automatically learning probabilistic Hierarchical Task Networks (pHTNs) in order to capture a user's preferences on plans, by observing only the user's behavior. HTNs are a common choice of representation for a variety of purposes in planning, including work on learning in planning. Our contributions are (a) learning structure and (b) representing preferences. In contrast, prior work employing HTNs considers learning method preconditions (instead of structure) and representing domain physics or search control knowledge (rather than preferences). Initially we will assume that the observed distribution of plans is an accurate representation of user preference, and then generalize to the situation where feasibility constraints frequently prevent the execution of preferred plans. In order to learn a distribution on plans we adapt an Expectation-Maximization (EM) technique from the discipline of (probabilistic) grammar induction, taking the perspective of task reductions as productions in a context-free grammar over primitive actions. To account for the difference between the distributions of possible and preferred plans we subsequently modify this core EM technique, in short, by rescaling its input.