 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Poisson systems and trajectories of autonomous systems via Poisson neural networks
Paper and Code
Dec 05, 2020
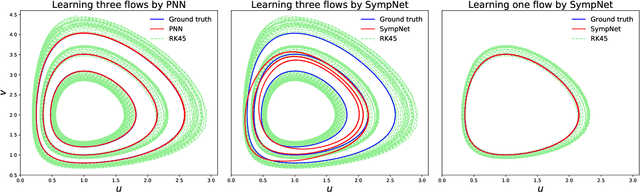
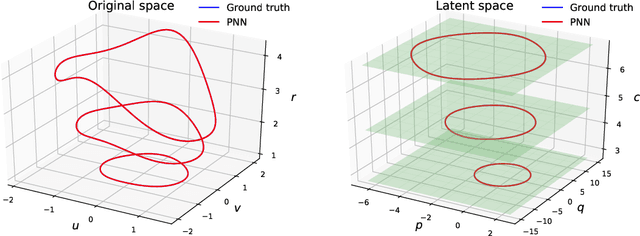

We propose the Poisson neural networks (PNNs) to learn Poisson systems and trajectories of autonomous systems from data. Based on the Darboux-Lie theorem, the phase flow of a Poisson system can be written as the composition of (1) a coordinate transformation, (2) an extended symplectic map and (3) the inverse of the transformation. In this work, we extend this result to the unknotted trajectories of autonomous systems. We employ structured neural networks with physical priors to approximate the three aforementioned maps. We demonstrate through several simulations that PNNs are capable of handling very accurately several challenging tasks, including the motion of a particle in the electromagnetic potential, the nonlinear Schr{\"o}dinger equation, and pixel observations of the two-body problem.