 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Perceptual Locomotion on Uneven Terrains using Sparse Visual Observations
Paper and Code
Sep 28, 2021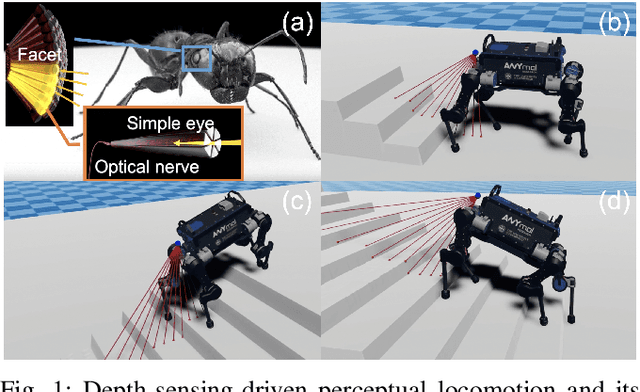
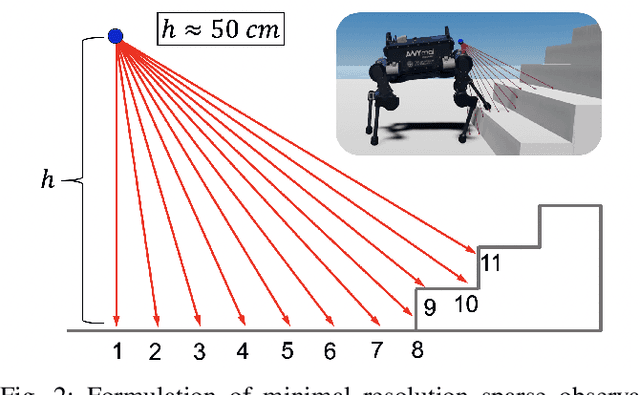
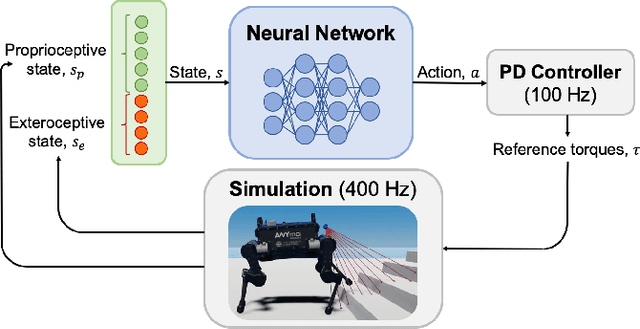
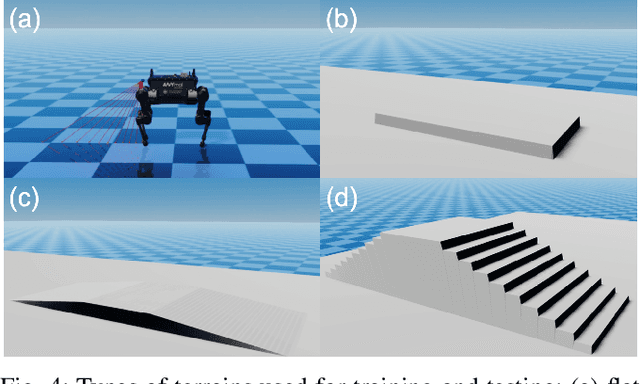
Legged robots have achieved remarkable performance in blind walking using either model-based control or data-driven deep reinforcement learning. To proactively navigate and traverse various terrains, active use of visual perception becomes indispensable, and this work aims to exploit the use of sparse visual observations to achieve perceptual locomotion over a range of commonly seen bumps, ramps, and stairs in human-centred environments. We first formulate the selection of minimal visual input that can represent the uneven surfaces of interest, and propose a learning framework that integrates such exteroceptive and proprioceptive data. We specifically select state observations and design a training curriculum to learn feedback control policies more effectively over a range of different terrains. Using an extensive benchmark, we validate the learned policy in tasks that require omnidirectional walking over flat ground and forward locomotion over terrains with obstacles, showing a high success rate of traversal. Particularly, the robot performs autonomous perceptual locomotion with minimal visual perception using depth measurements, which are easily available from a Lidar or RGB-D sensor, and successfully demonstrates robust ascent and descent over high stairs of 20 cm step height, i.e., 50% of its leg length.