Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Nonlinear Dynamics and Chaos: A Universal Framework for Knowledge-Based System Identification and Prediction
Paper and Code
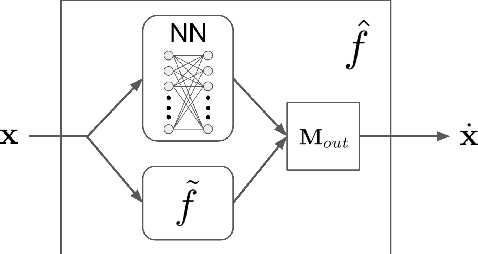
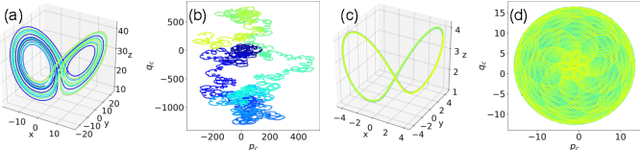
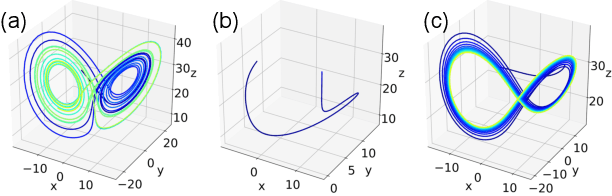
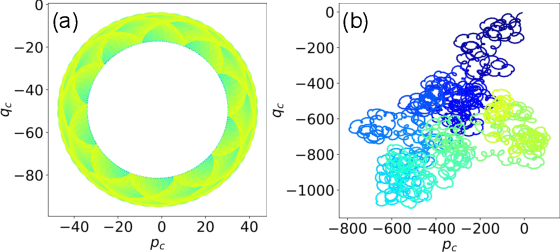
We present a universal framework for learning the behavior of dynamical systems from observations. We formulate the learning task as a constrained optimization problem which can be efficiently solved with the adjoint sensitivity method. Our scheme is flexible with regards to the choice of model, and existing knowledge can be readily incorporated for hybrid learning. We demonstrate the effectiveness of our scheme by learning a variety of systems including a stiff Van der Pol oscillator, a chaotic Lorenz system, and the Kuramoto-Sivashinsky equation. We also include examples of hybrid learning and learning from noisy observations.
* 10 pages, 8 figures in main text, 3 figures and 6 tables in
supplement; Revised intro and conclusion, formatted for submission
View paper on