 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Models as Functionals of Signed-Distance Fields for Manipulation Planning
Paper and Code
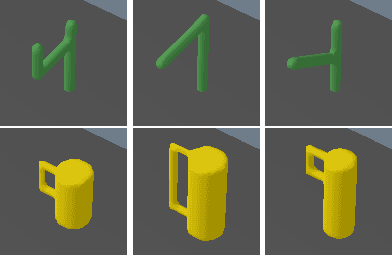
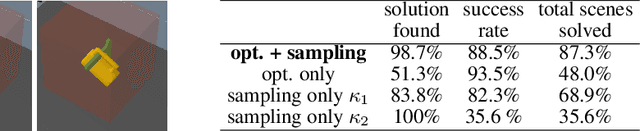
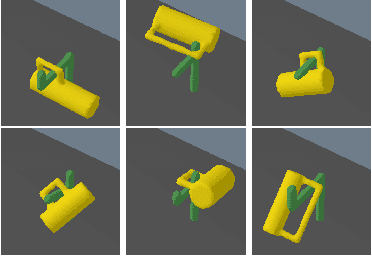
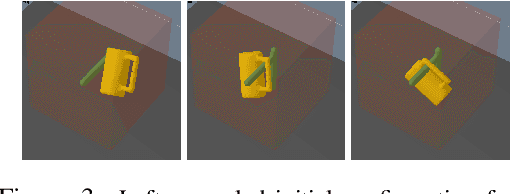
This work proposes an optimization-based manipulation planning framework where the objectives are learned functionals of signed-distance fields that represent objects in the scene. Most manipulation planning approaches rely on analytical models and carefully chosen abstractions/state-spaces to be effective. A central question is how models can be obtained from data that are not primarily accurate in their predictions, but, more importantly, enable efficient reasoning within a planning framework, while at the same time being closely coupled to perception spaces. We show that representing objects as signed-distance fields not only enables to learn and represent a variety of models with higher accuracy compared to point-cloud and occupancy measure representations, but also that SDF-based models are suitable for optimization-based planning. To demonstrate the versatility of our approach, we learn both kinematic and dynamic models to solve tasks that involve hanging mugs on hooks and pushing objects on a table. We can unify these quite different tasks within one framework, since SDFs are the common object representation. Video: https://youtu.be/ga8Wlkss7co