 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning model-based planning from scratch
Paper and Code
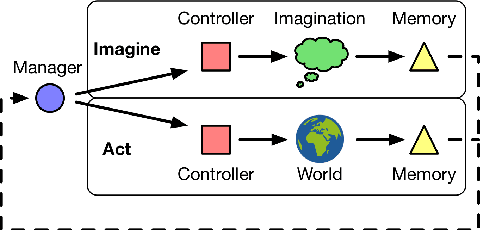
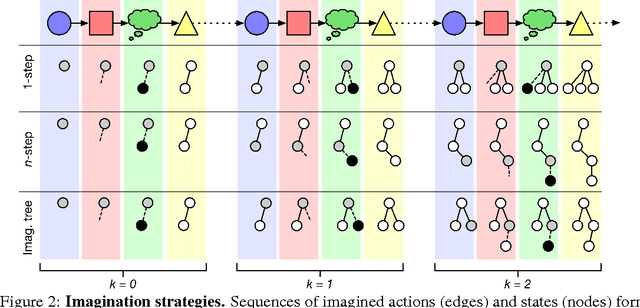

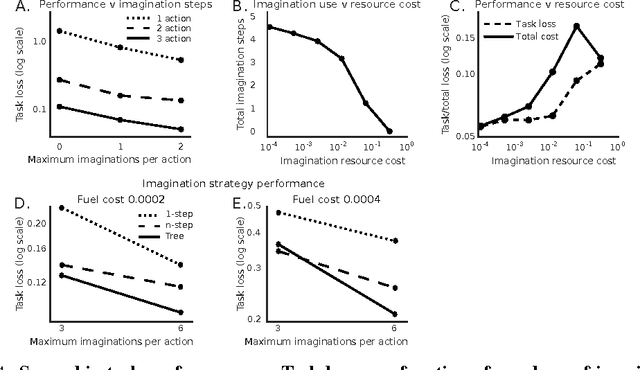
Conventional wisdom holds that model-based planning is a powerful approach to sequential decision-making. It is often very challenging in practice, however, because while a model can be used to evaluate a plan, it does not prescribe how to construct a plan. Here we introduce the "Imagination-based Planner", the first model-based, sequential decision-making agent that can learn to construct, evaluate, and execute plans. Before any action, it can perform a variable number of imagination steps, which involve proposing an imagined action and evaluating it with its model-based imagination. All imagined actions and outcomes are aggregated, iteratively, into a "plan context" which conditions future real and imagined actions. The agent can even decide how to imagine: testing out alternative imagined actions, chaining sequences of actions together, or building a more complex "imagination tree" by navigating flexibly among the previously imagined states using a learned policy. And our agent can learn to plan economically, jointly optimizing for external rewards and computational costs associated with using its imagination. We show that our architecture can learn to solve a challenging continuous control problem, and also learn elaborate planning strategies in a discrete maze-solving task. Our work opens a new direction toward learning the components of a model-based planning system and how to use them.