 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning latent state representation for speeding up exploration
Paper and Code
May 27, 2019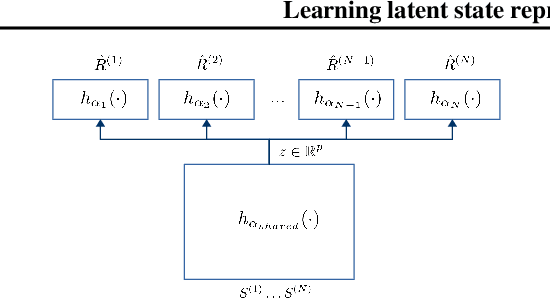
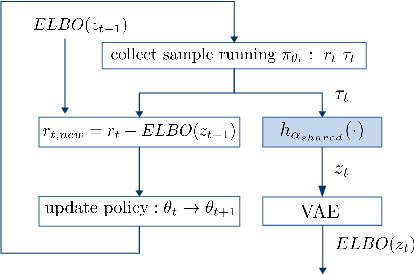
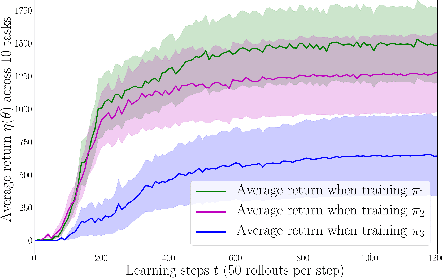
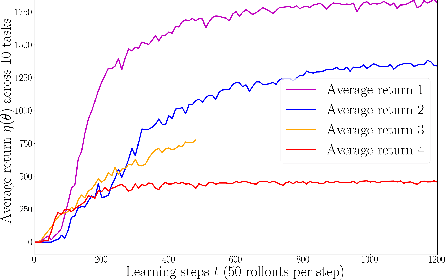
Exploration is an extremely challenging problem in reinforcement learning, especially in high dimensional state and action spaces and when only sparse rewards are available. Effective representations can indicate which components of the state are task relevant and thus reduce the dimensionality of the space to explore. In this work, we take a representation learning viewpoint on exploration, utilizing prior experience to learn effective latent representations, which can subsequently indicate which regions to explore. Prior experience on separate but related tasks help learn representations of the state which are effective at predicting instantaneous rewards. These learned representations can then be used with an entropy-based exploration method to effectively perform exploration in high dimensional spaces by effectively lowering the dimensionality of the search space. We show the benefits of this representation for meta-exploration in a simulated object pushing environment.