 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Keypoints from Synthetic Data for Robotic Cloth Folding
Paper and Code

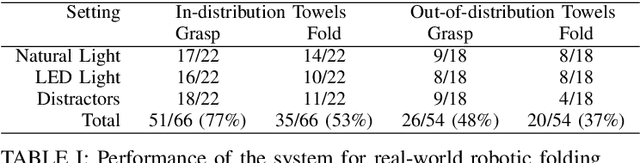
Robotic cloth manipulation is challenging due to its deformability, which makes determining its full state infeasible. However, for cloth folding, it suffices to know the position of a few semantic keypoints. Convolutional neural networks (CNN) can be used to detect these keypoints, but require large amounts of annotated data, which is expensive to collect. To overcome this, we propose to learn these keypoint detectors purely from synthetic data, enabling low-cost data collection. In this paper, we procedurally generate images of towels and use them to train a CNN. We evaluate the performance of this detector for folding towels on a unimanual robot setup and find that the grasp and fold success rates are 77% and 53%, respectively. We conclude that learning keypoint detectors from synthetic data for cloth folding and related tasks is a promising research direction, discuss some failures and relate them to future work. A video of the system, as well as the codebase, more details on the CNN architecture and the training setup can be found at https://github.com/tlpss/workshop-icra-2022-cloth-keypoints.git.