 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Human-Robot Collaboration Insights through the Integration of Muscle Activity in Interaction Motion Models
Paper and Code
Aug 08, 2017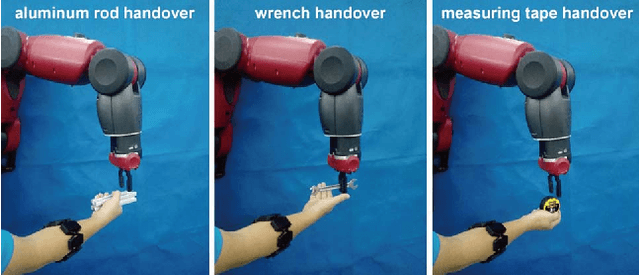
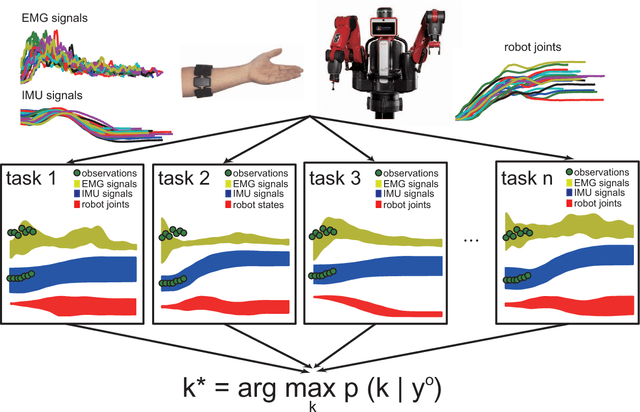
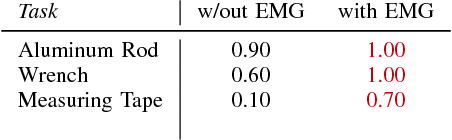
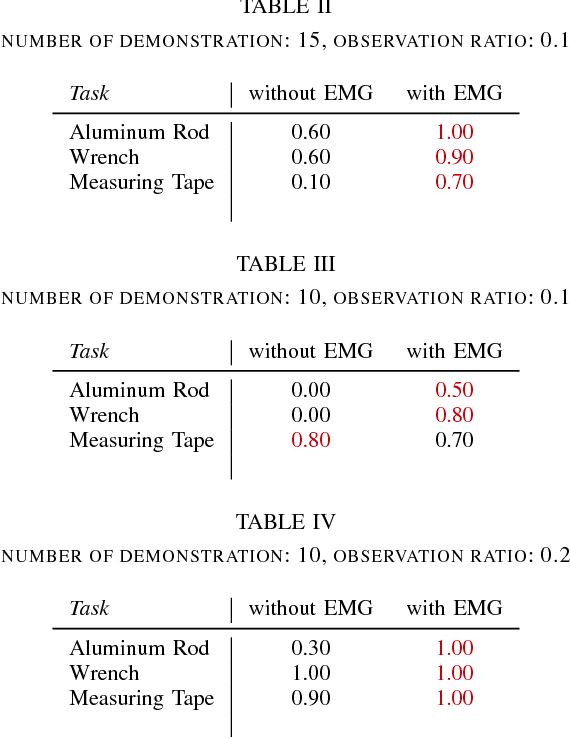
Recent progress in human-robot collaboration makes fast and fluid interactions possible, even when human observations are partial and occluded. Methods like Interaction Probabilistic Movement Primitives (ProMP) model human trajectories through motion capture systems. However, such representation does not properly model tasks where similar motions handle different objects. Under current approaches, a robot would not adapt its pose and dynamics for proper handling. We integrate the use of Electromyography (EMG) into the Interaction ProMP framework and utilize muscular signals to augment the human observation representation. The contribution of our paper is increased task discernment when trajectories are similar but tools are different and require the robot to adjust its pose for proper handling. Interaction ProMPs are used with an augmented vector that integrates muscle activity. Augmented time-normalized trajectories are used in training to learn correlation parameters and robot motions are predicted by finding the best weight combination and temporal scaling for a task. Collaborative single task scenarios with similar motions but different objects were used and compared. For one experiment only joint angles were recorded, for the other EMG signals were additionally integrated. Task recognition was computed for both tasks. Observation state vectors with augmented EMG signals were able to completely identify differences across tasks, while the baseline method failed every time. Integrating EMG signals into collaborative tasks significantly increases the ability of the system to recognize nuances in the tasks that are otherwise imperceptible, up to 74.6% in our studies. Furthermore, the integration of EMG signals for collaboration also opens the door to a wide class of human-robot physical interactions based on haptic communication that has been largely unexploited in the field.