 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Gaussian Policies from Corrective Human Feedback
Paper and Code
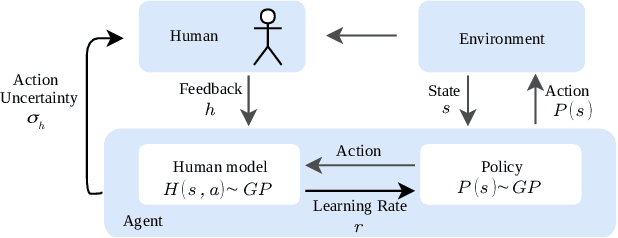
Learning from human feedback is a viable alternative to control design that does not require modelling or control expertise. Particularly, learning from corrective advice garners advantages over evaluative feedback as it is a more intuitive and scalable format. The current state-of-the-art in this field, COACH, has proven to be a effective approach for confined problems. However, it parameterizes the policy with Radial Basis Function networks, which require meticulous feature space engineering for higher order systems. We introduce Gaussian Process Coach (GPC), where feature space engineering is avoided by employing Gaussian Processes. In addition, we use the available policy uncertainty to 1) inquire feedback samples of maximal utility and 2) to adapt the learning rate to the teacher's learning phase. We demonstrate that the novel algorithm outperforms the current state-of-the-art in final performance, convergence rate and robustness to erroneous feedback in OpenAI Gym continuous control benchmarks, both for simulated and real human teachers.