 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning from Richer Human Guidance: Augmenting Comparison-Based Learning with Feature Queries
Paper and Code
Feb 05, 2018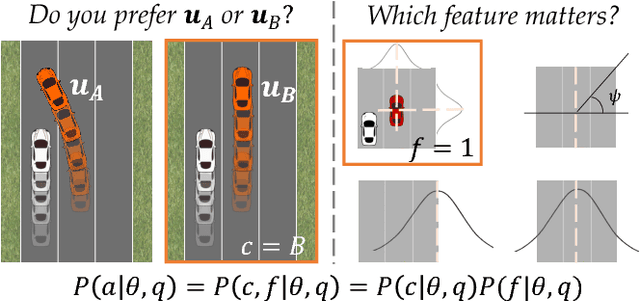
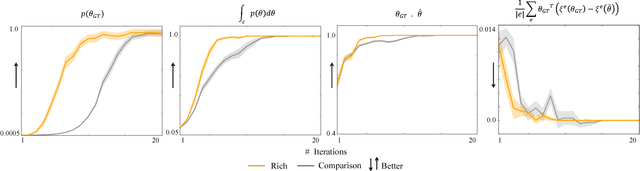
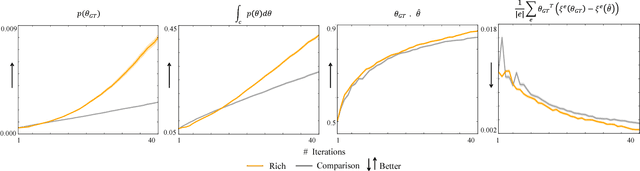
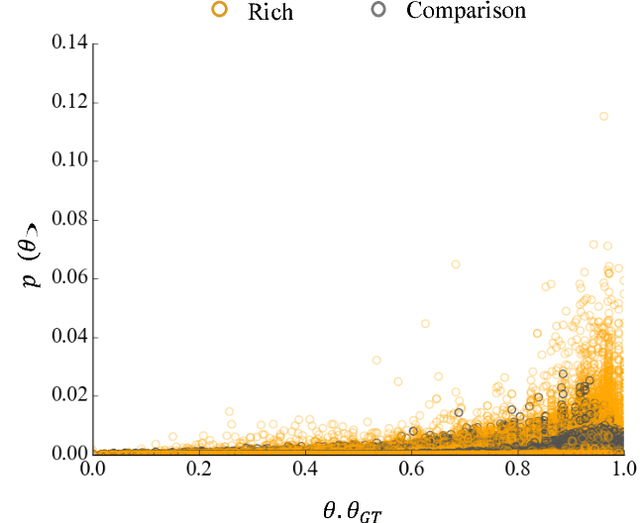
We focus on learning the desired objective function for a robot. Although trajectory demonstrations can be very informative of the desired objective, they can also be difficult for users to provide. Answers to comparison queries, asking which of two trajectories is preferable, are much easier for users, and have emerged as an effective alternative. Unfortunately, comparisons are far less informative. We propose that there is much richer information that users can easily provide and that robots ought to leverage. We focus on augmenting comparisons with feature queries, and introduce a unified formalism for treating all answers as observations about the true desired reward. We derive an active query selection algorithm, and test these queries in simulation and on real users. We find that richer, feature-augmented queries can extract more information faster, leading to robots that better match user preferences in their behavior.