 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Diverse and Physically Feasible Dexterous Grasps with Generative Model and Bilevel Optimization
Paper and Code
Jul 01, 2022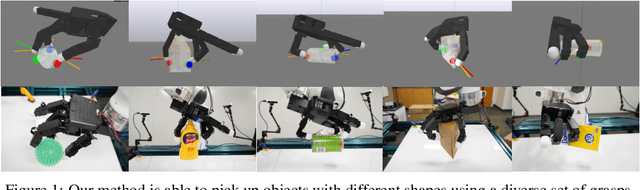
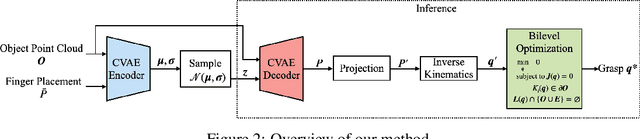
To fully utilize the versatility of a multi-finger dexterous robotic hand for object grasping, one must satisfy complex physical constraints introduced by hand-object interaction and object geometry during grasp planning. We propose an integrative approach of combining a generative model and a bilevel optimization to compute diverse grasps for novel unseen objects. First, a grasp prediction is obtained from a conditional variational autoencoder trained on merely six YCB objects. The prediction is then projected onto the manifold of kinematically and dynamically feasible grasps by jointly solving collision-aware inverse kinematics, force closure, and friction constraints as one nonconvex bilevel optimization. We demonstrate the effectiveness of our method on hardware by successfully grasping a wide range of unseen household objects, including adversarial shapes challenging to other types of robotic grippers. A video summary of our results is available at https://youtu.be/9DTrImbN99I.