 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Dense Reward with Temporal Variant Self-Supervision
Paper and Code
May 26, 2022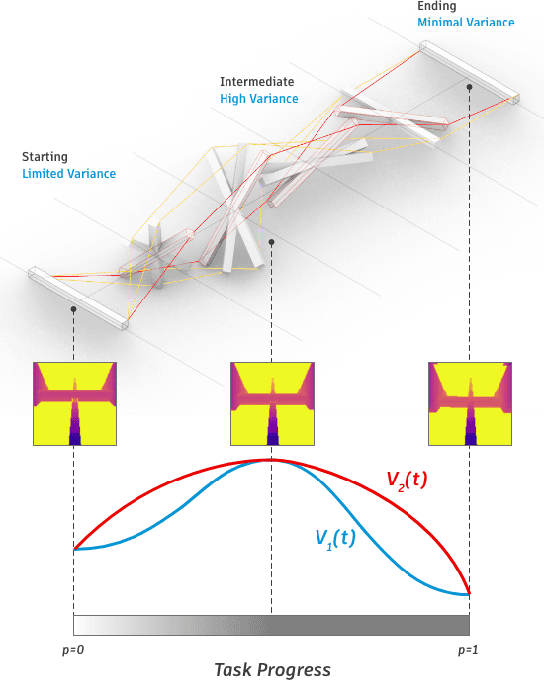
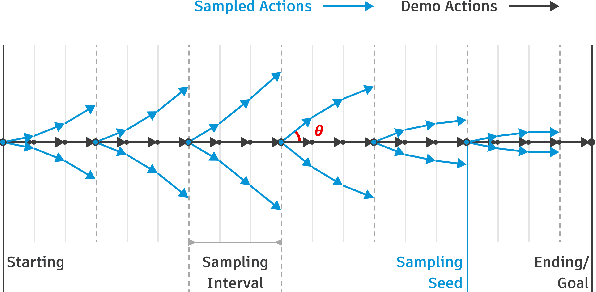
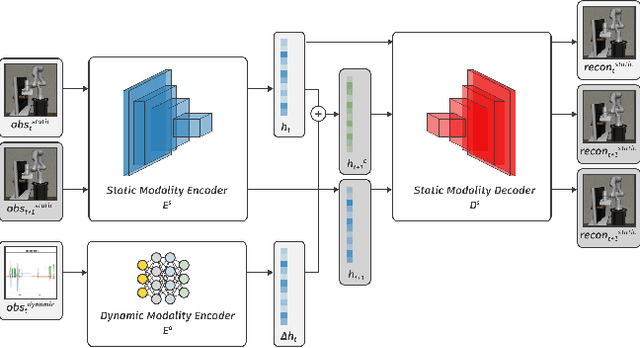
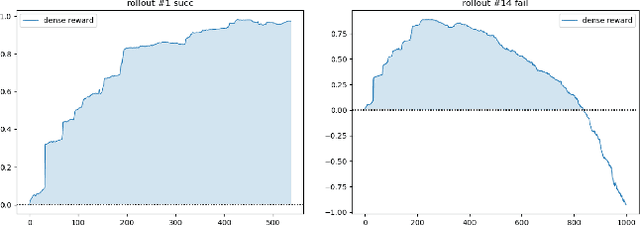
Rewards play an essential role in reinforcement learning. In contrast to rule-based game environments with well-defined reward functions, complex real-world robotic applications, such as contact-rich manipulation, lack explicit and informative descriptions that can directly be used as a reward. Previous effort has shown that it is possible to algorithmically extract dense rewards directly from multimodal observations. In this paper, we aim to extend this effort by proposing a more efficient and robust way of sampling and learning. In particular, our sampling approach utilizes temporal variance to simulate the fluctuating state and action distribution of a manipulation task. We then proposed a network architecture for self-supervised learning to better incorporate temporal information in latent representations. We tested our approach in two experimental setups, namely joint-assembly and door-opening. Preliminary results show that our approach is effective and efficient in learning dense rewards, and the learned rewards lead to faster convergence than baselines.