 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Deep SDF Maps Online for Robot Navigation and Exploration
Paper and Code
Aug 02, 2022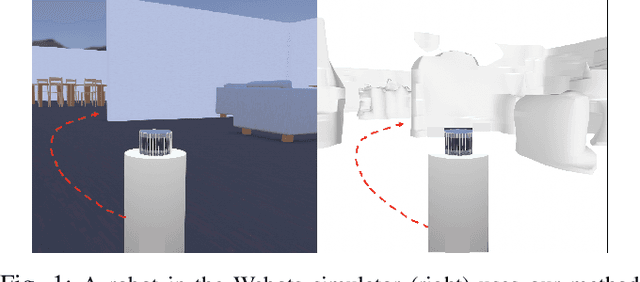
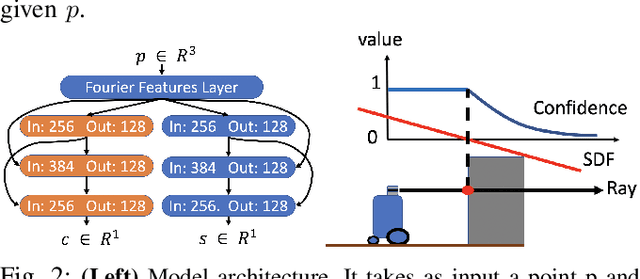
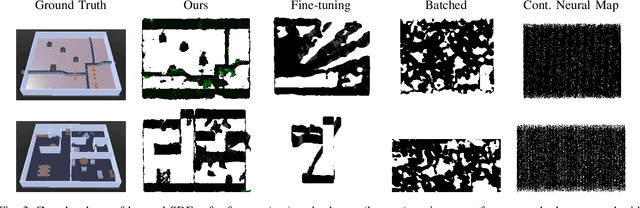
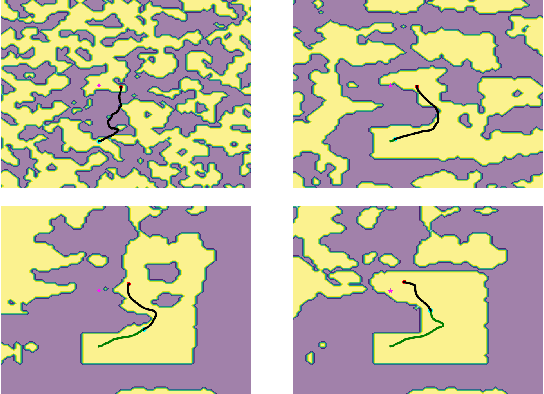
We propose an algorithm to (i) learn online a deep signed distance function (SDF) with a LiDAR-equipped robot to represent the 3D environment geometry, and (ii) plan collision-free trajectories given this deep learned map. Our algorithm takes a stream of incoming LiDAR scans and continually optimizes a neural network to represent the SDF of the environment around its current vicinity. When the SDF network quality saturates, we cache a copy of the network, along with a learned confidence metric, and initialize a new SDF network to continue mapping new regions of the environment. We then concatenate all the cached local SDFs through a confidence-weighted scheme to give a global SDF for planning. For planning, we make use of a sequential convex model predictive control (MPC) algorithm. The MPC planner optimizes a dynamically feasible trajectory for the robot while enforcing no collisions with obstacles mapped in the global SDF. We show that our online mapping algorithm produces higher-quality maps than existing methods for online SDF training. In the WeBots simulator, we further showcase the combined mapper and planner running online -- navigating autonomously and without collisions in an unknown environment.