 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Data-Driven Stable Koopman Operators
Paper and Code
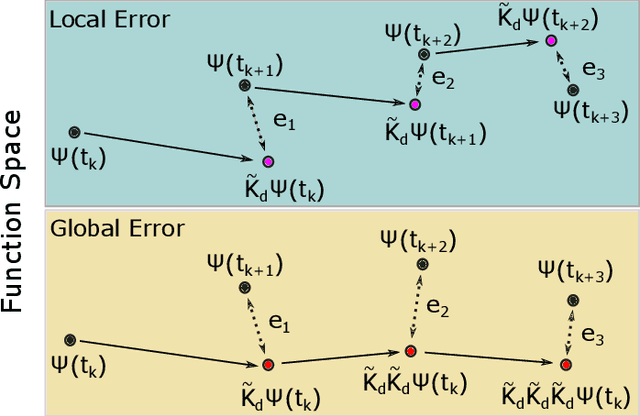



In this paper, we consider the problem of improving the long-term accuracy of data-driven approximations of Koopman operators, which are infinite-dimensional linear representations of general nonlinear systems, by bounding the eigenvalues of the linear operator. We derive a formula for the global error of general Koopman representations and motivate imposing stability constraints on the data-driven model to improve the approximation of nonlinear systems over a longer horizon. In addition, constraints on admissible basis functions for a stable Koopman operator are presented, as well as conditions for constructing a Lyapunov function for nonlinear systems. The modified linear representation is the nearest \textit{stable} (all eigenvalues are equal or less than 1) matrix solution to a least-squares minimization and bounds the prediction of the system response. We demonstrate the benefit of stable Koopman operators in prediction and control performance using the systems of a pendulum, a hopper, and a quadrotor.