 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Convex Regularizers for Optimal Bayesian Denoising
Paper and Code
May 16, 2017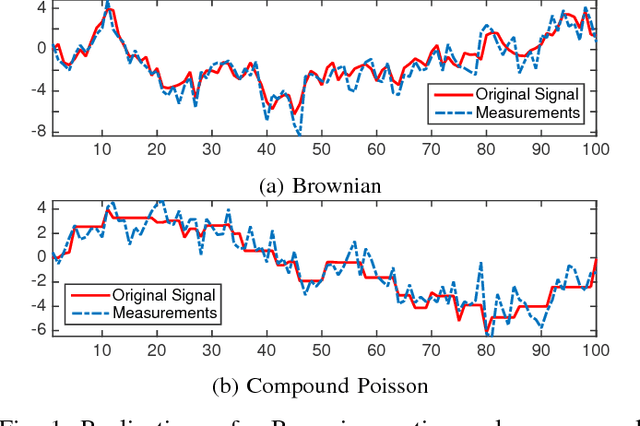
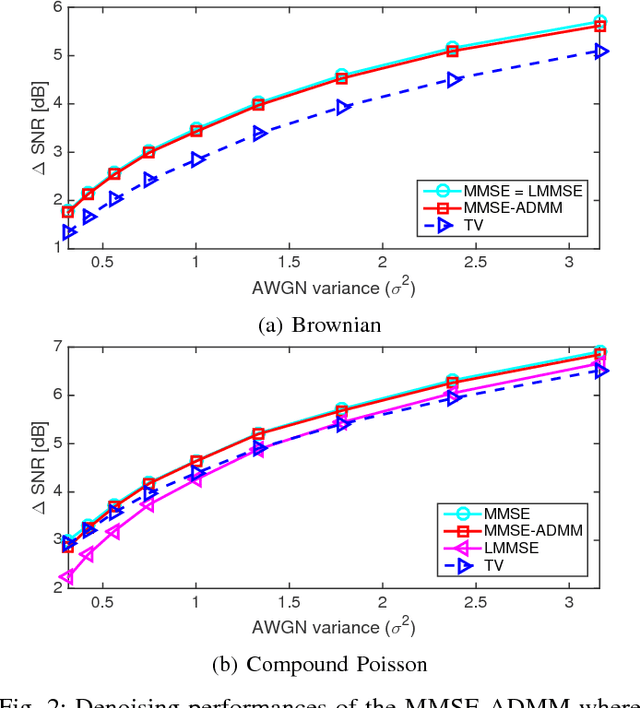
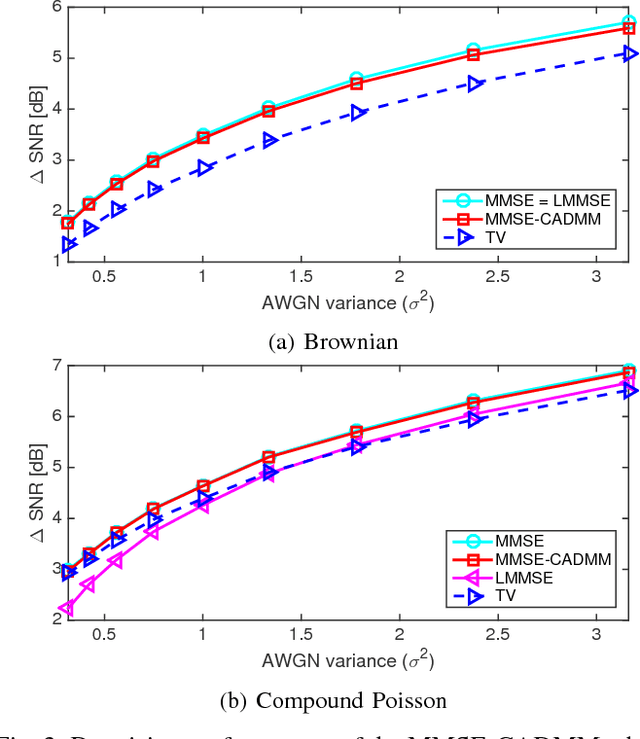
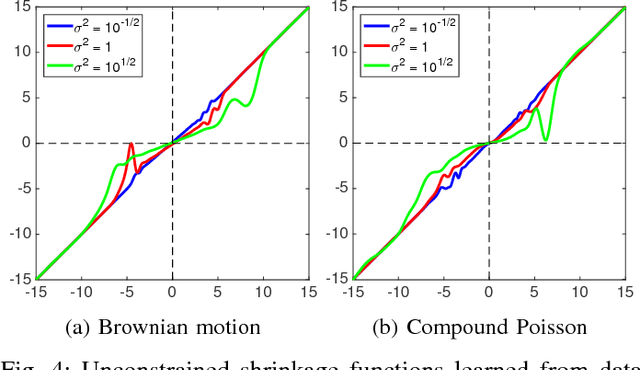
We propose a data-driven algorithm for the maximum a posteriori (MAP) estimation of stochastic processes from noisy observations. The primary statistical properties of the sought signal is specified by the penalty function (i.e., negative logarithm of the prior probability density function). Our alternating direction method of multipliers (ADMM)-based approach translates the estimation task into successive applications of the proximal mapping of the penalty function. Capitalizing on this direct link, we define the proximal operator as a parametric spline curve and optimize the spline coefficients by minimizing the average reconstruction error for a given training set. The key aspects of our learning method are that the associated penalty function is constrained to be convex and the convergence of the ADMM iterations is proven. As a result of these theoretical guarantees, adaptation of the proposed framework to different levels of measurement noise is extremely simple and does not require any retraining. We apply our method to estimation of both sparse and non-sparse models of L\'{e}vy processes for which the minimum mean square error (MMSE) estimators are available. We carry out a single training session and perform comparisons at various signal-to-noise ratio (SNR) values. Simulations illustrate that the performance of our algorithm is practically identical to the one of the MMSE estimator irrespective of the noise power.