 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Camera Performance Models for Active Multi-Camera Visual Teach and Repeat
Paper and Code
Mar 25, 2021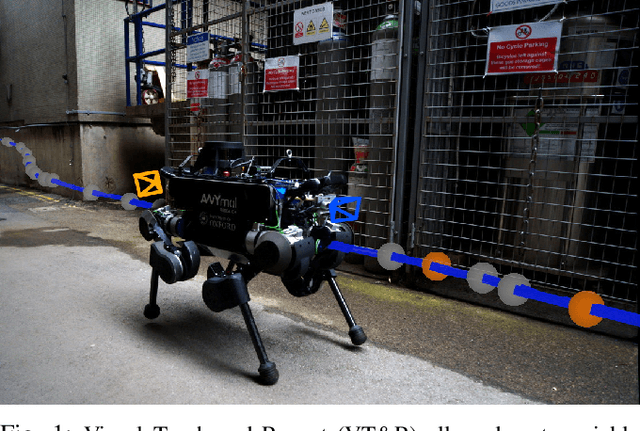
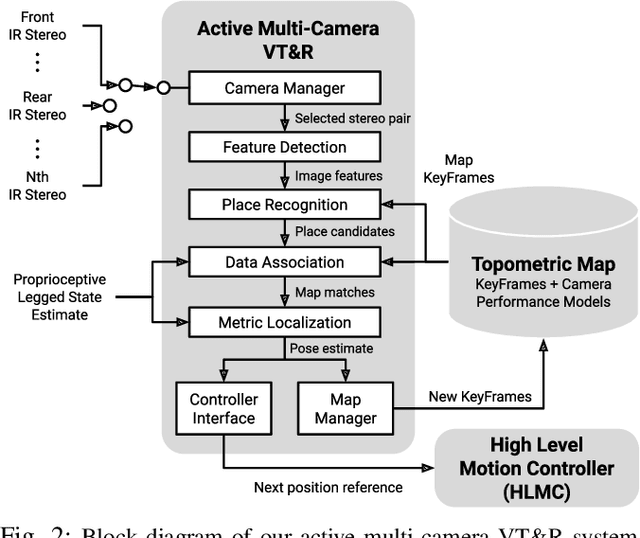
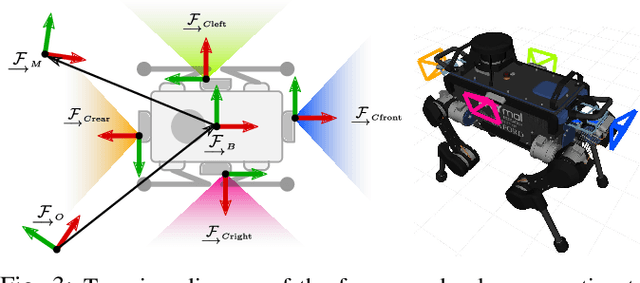
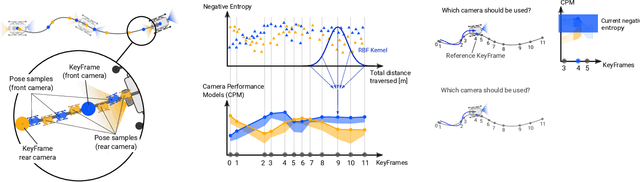
In dynamic and cramped industrial environments, achieving reliable Visual Teach and Repeat (VT&R) with a single-camera is challenging. In this work, we develop a robust method for non-synchronized multi-camera VT&R. Our contribution are expected Camera Performance Models (CPM) which evaluate the camera streams from the teach step to determine the most informative one for localization during the repeat step. By actively selecting the most suitable camera for localization, we are able to successfully complete missions when one of the cameras is occluded, faces into feature poor locations or if the environment has changed. Furthermore, we explore the specific challenges of achieving VT&R on a dynamic quadruped robot, ANYmal. The camera does not follow a linear path (due to the walking gait and holonomicity) such that precise path-following cannot be achieved. Our experiments feature forward and backward facing stereo cameras showing VT&R performance in cluttered indoor and outdoor scenarios. We compared the trajectories the robot executed during the repeat steps demonstrating typical tracking precision of less than 10cm on average. With a view towards omni-directional localization, we show how the approach generalizes to four cameras in simulation. Video: https://youtu.be/iAY0lyjAnqY