 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-based Bias Correction for Ultra-wideband Localization of Resource-constrained Mobile Robots
Paper and Code
Mar 20, 2020
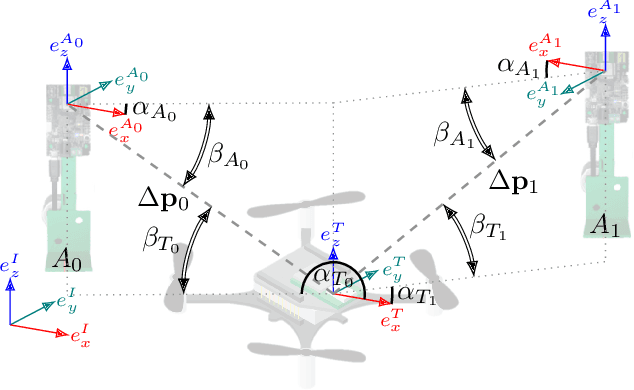
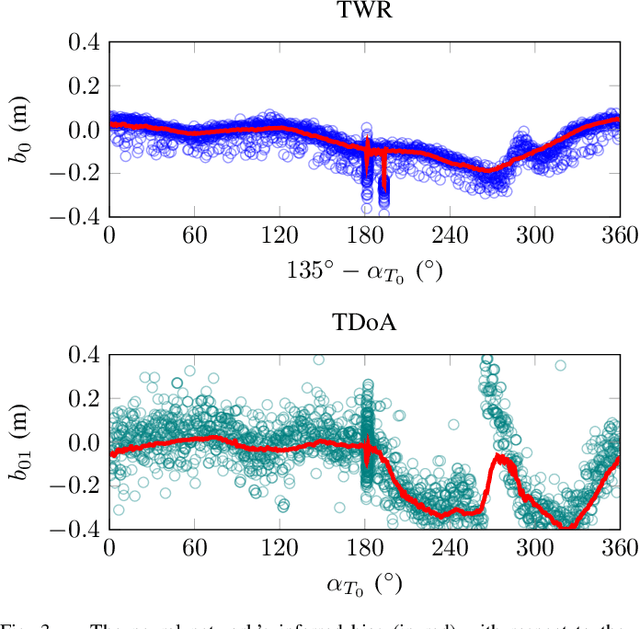
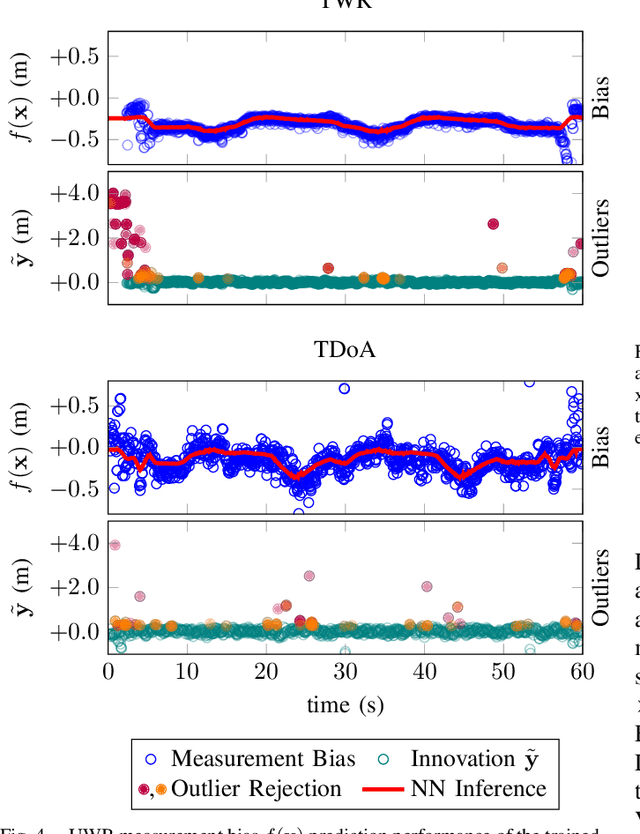
Accurate indoor localization is a crucial enabling technology for many robotics applications, from warehouse management to monitoring tasks. Ultra-wideband (UWB) ranging is a promising solution which is low-cost, lightweight, and computationally inexpensive compared to alternative state-of-the-art approaches such as simultaneous localization and mapping, making it especially suited for resource-constrained aerial robots. Many commercially-available ultra-wideband radios, however, provide inaccurate, biased range measurements. In this article, we propose a bias correction framework compatible with both two-way ranging and time difference of arrival ultra-wideband localization. Our method comprises of two steps: (i) statistical outlier rejection and (ii) a learning-based bias correction. This approach is scalable and frugal enough to be deployed on-board a nano-quadcopter's microcontroller. Previous research mostly focused on two-way ranging bias correction and has not been implemented in closed-loop nor using resource-constrained robots. Experimental results show that, using our approach, the localization error is reduced by ~18.5% and 48% (for TWR and TDoA, respectively), and a quadcopter can accurately track trajectories with position information from UWB only.