 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-based Adaptive Control via Contraction Theory
Paper and Code
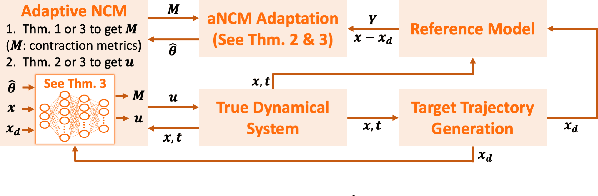
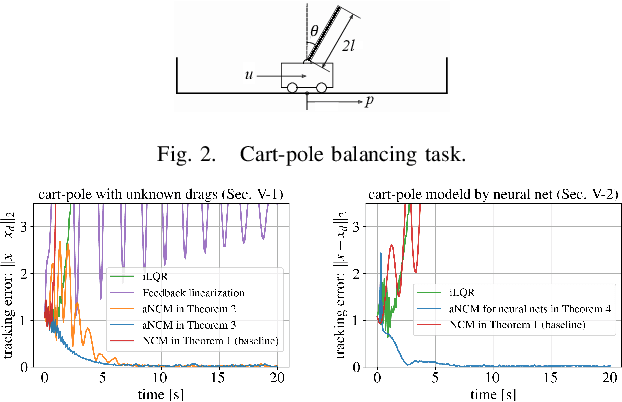
We present a new deep learning-based adaptive control framework for nonlinear systems with multiplicatively-separable parametric uncertainty, called an adaptive Neural Contraction Metric (aNCM). The aNCM uses a neural network model of an optimal adaptive contraction metric, the existence of which guarantees asymptotic stability and exponential boundedness of system trajectories under the parametric uncertainty. In particular, we exploit the concept of a Neural Contraction Metric (NCM) to obtain a nominal provably stable robust control policy for nonlinear systems with bounded disturbances, and combine this policy with a novel adaptation law to achieve stability guarantees. We also show that the framework is applicable to adaptive control of dynamical systems modeled via basis function approximation. Furthermore, the use of neural networks in the aNCM permits its real-time implementation, resulting in broad applicability to a variety of systems. Its superiority to the state-of-the-art is illustrated with a simple cart-pole balancing task.