 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Articulated Motion Models from Visual and Lingual Signals
Paper and Code
Jul 01, 2016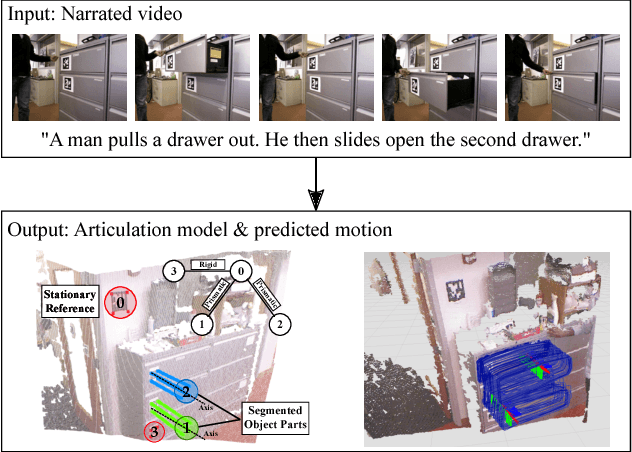
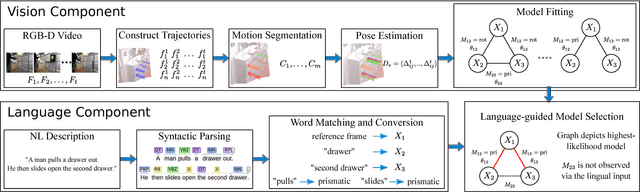
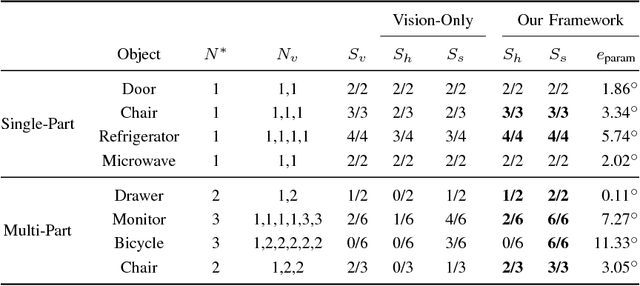
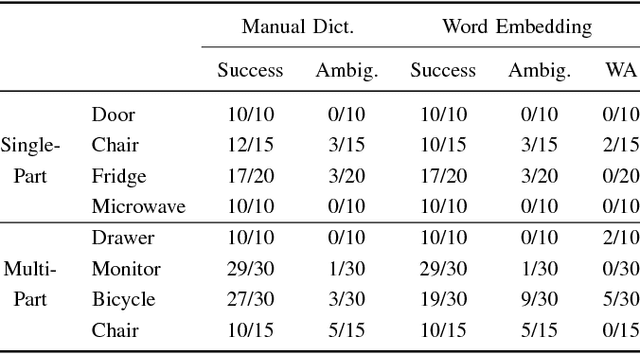
In order for robots to operate effectively in homes and workplaces, they must be able to manipulate the articulated objects common within environments built for and by humans. Previous work learns kinematic models that prescribe this manipulation from visual demonstrations. Lingual signals, such as natural language descriptions and instructions, offer a complementary means of conveying knowledge of such manipulation models and are suitable to a wide range of interactions (e.g., remote manipulation). In this paper, we present a multimodal learning framework that incorporates both visual and lingual information to estimate the structure and parameters that define kinematic models of articulated objects. The visual signal takes the form of an RGB-D image stream that opportunistically captures object motion in an unprepared scene. Accompanying natural language descriptions of the motion constitute the lingual signal. We present a probabilistic language model that uses word embeddings to associate lingual verbs with their corresponding kinematic structures. By exploiting the complementary nature of the visual and lingual input, our method infers correct kinematic structures for various multiple-part objects on which the previous state-of-the-art, visual-only system fails. We evaluate our multimodal learning framework on a dataset comprised of a variety of household objects, and demonstrate a 36% improvement in model accuracy over the vision-only baseline.