 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning and reusing primitive behaviours to improve Hindsight Experience Replay sample efficiency
Paper and Code
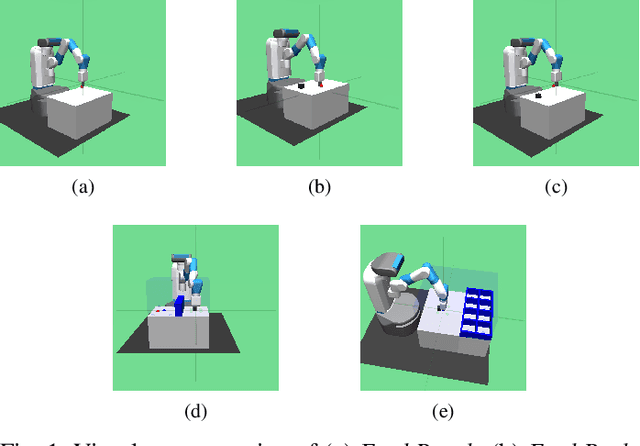
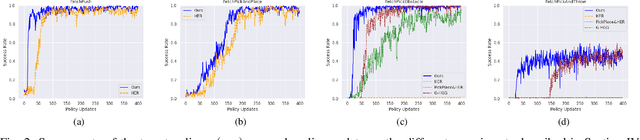
Hindsight Experience Replay (HER) is a technique used in reinforcement learning (RL) that has proven to be very efficient for training off-policy RL-based agents to solve goal-based robotic manipulation tasks using sparse rewards. Even though HER improves the sample efficiency of RL-based agents by learning from mistakes made in past experiences, it does not provide any guidance while exploring the environment. This leads to very large training times due to the volume of experience required to train an agent using this replay strategy. In this paper, we propose a method that uses primitive behaviours that have been previously learned to solve simple tasks in order to guide the agent toward more rewarding actions during exploration while learning other more complex tasks. This guidance, however, is not executed by a manually designed curriculum, but rather using a critic network to decide at each timestep whether or not to use the actions proposed by the previously-learned primitive policies. We evaluate our method by comparing its performance against HER and other more efficient variations of this algorithm in several block manipulation tasks. We demonstrate the agents can learn a successful policy faster when using our proposed method, both in terms of sample efficiency and computation time. Code is available at https://github.com/franroldans/qmp-her.