 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning and Reasoning for Robot Dialog and Navigation Tasks
Paper and Code
May 20, 2020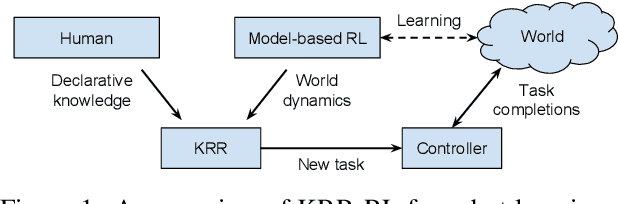
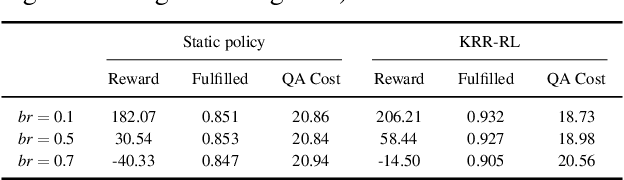
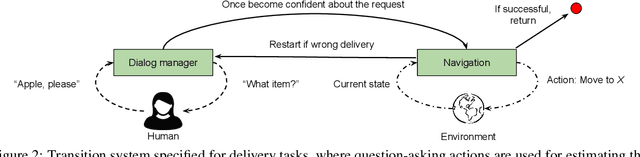
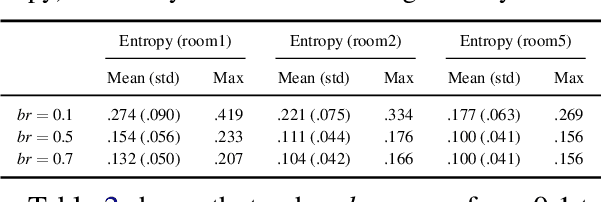
Reinforcement learning and probabilistic reasoning algorithms aim at learning from interaction experiences and reasoning with probabilistic contextual knowledge respectively. In this research, we develop algorithms for robot task completions, while looking into the complementary strengths of reinforcement learning and probabilistic reasoning techniques. The robots learn from trial-and-error experiences to augment their declarative knowledge base, and the augmented knowledge can be used for speeding up the learning process in potentially different tasks. We have implemented and evaluated the developed algorithms using mobile robots conducting dialog and navigation tasks. From the results, we see that our robot's performance can be improved by both reasoning with human knowledge and learning from task-completion experience. More interestingly, the robot was able to learn from navigation tasks to improve its dialog strategies.