 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning and Planning in Average-Reward Markov Decision Processes
Paper and Code
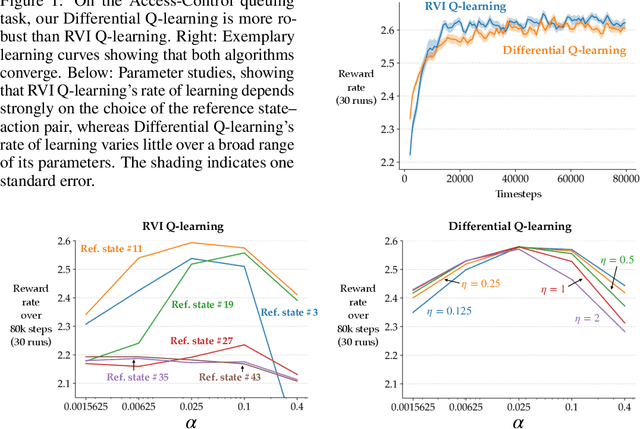
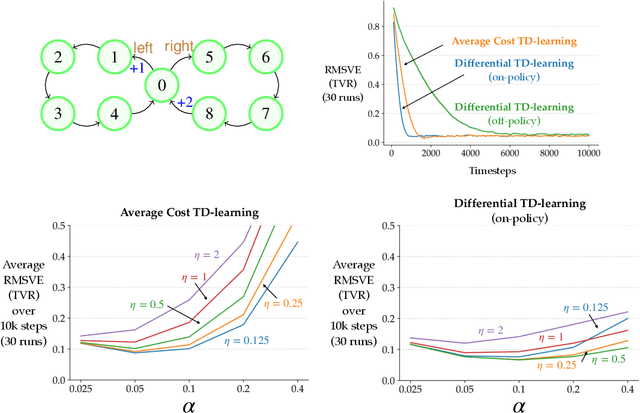
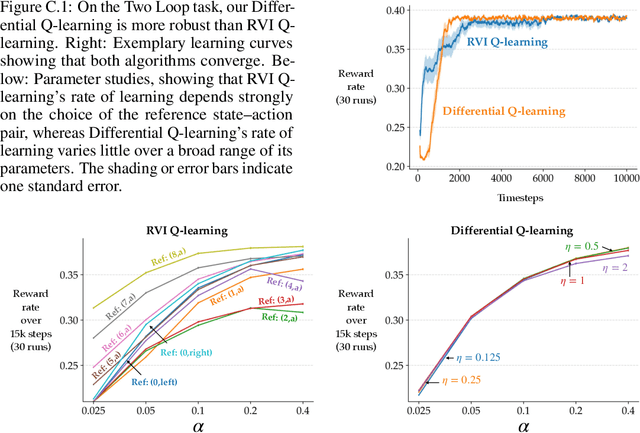

We introduce improved learning and planning algorithms for average-reward MDPs, including 1) the first general proven-convergent off-policy model-free control algorithm without reference states, 2) the first proven-convergent off-policy model-free prediction algorithm, and 3) the first learning algorithms that converge to the actual value function rather than to the value function plus an offset. All of our algorithms are based on using the temporal-difference error rather than the conventional error when updating the estimate of the average reward. Our proof techniques are based on those of Abounadi, Bertsekas, and Borkar (2001). Empirically, we show that the use of the temporal-difference error generally results in faster learning, and that reliance on a reference state generally results in slower learning and risks divergence. All of our learning algorithms are fully online, and all of our planning algorithms are fully incremental.