 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning and Executing Re-usable Behaviour Trees from Natural Language Instruction
Paper and Code
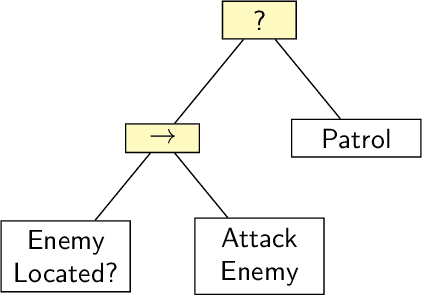
Domestic and service robots have the potential to transform industries such as health care and small-scale manufacturing, as well as the homes in which we live. However, due to the overwhelming variety of tasks these robots will be expected to complete, providing generic out-of-the-box solutions that meet the needs of every possible user is clearly intractable. To address this problem, robots must therefore not only be capable of learning how to complete novel tasks at run-time, but the solutions to these tasks must also be informed by the needs of the user. In this paper we demonstrate how behaviour trees, a well established control architecture in the fields of gaming and robotics, can be used in conjunction with natural language instruction to provide a robust and modular control architecture for instructing autonomous agents to learn and perform novel complex tasks. We also show how behaviour trees generated using our approach can be generalised to novel scenarios, and can be re-used in future learning episodes to create increasingly complex behaviours. We validate this work against an existing corpus of natural language instructions, demonstrate the application of our approach on both a simulated robot solving a toy problem, as well as two distinct real-world robot platforms which, respectively, complete a block sorting scenario, and a patrol scenario.