 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning an Efficient Terrain Representation for Haptic Localization of a Legged Robot
Paper and Code
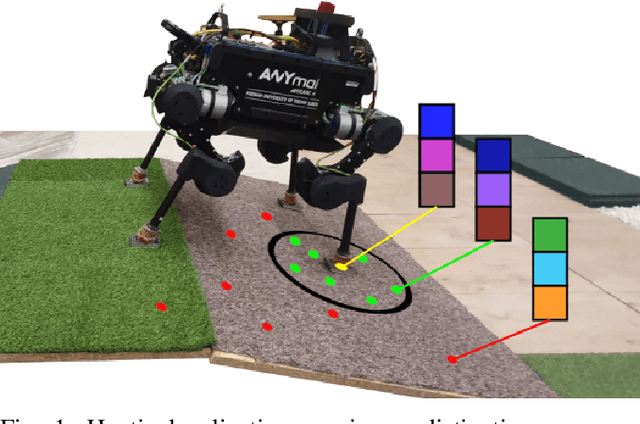



Although haptic sensing has recently been used for legged robot localization in extreme environments where a camera or LiDAR might fail, the problem of efficiently representing the haptic signatures in a learned prior map is still open. This paper introduces an approach to terrain representation for haptic localization inspired by recent trends in machine learning. It combines this approach with the proven Monte Carlo algorithm to obtain an accurate, computation-efficient, and practical method for localizing legged robots under adversarial environmental conditions. We apply the triplet loss concept to learn highly descriptive embeddings in a transformer-based neural network. As the training haptic data are not labeled, the positive and negative examples are discriminated by their geometric locations discovered while training. We demonstrate experimentally that the proposed approach outperforms by a large margin the previous solutions to haptic localization of legged robots concerning the accuracy, inference time, and the amount of data stored in the map. As far as we know, this is the first approach that completely removes the need to use a dense terrain map for accurate haptic localization, thus paving the way to practical applications.