 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning a Shared Model for Motorized Prosthetic Joints to Predict Ankle-Joint Motion
Paper and Code
Nov 14, 2021
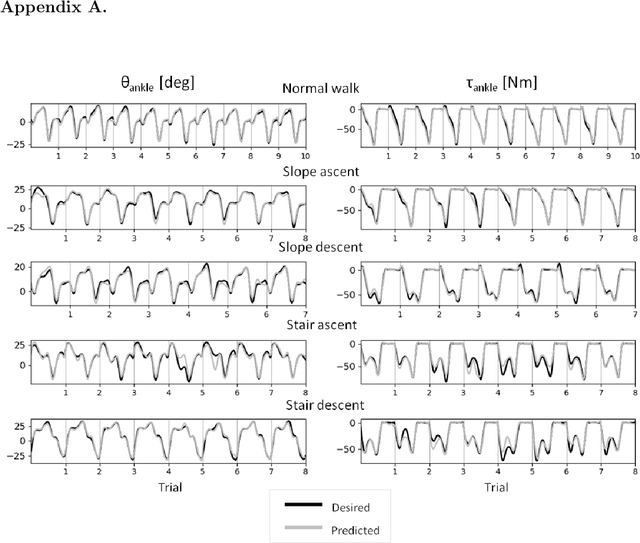
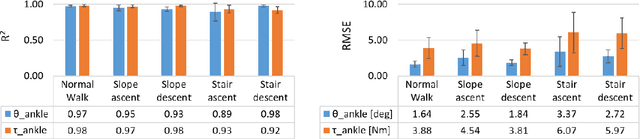
Control strategies for active prostheses or orthoses use sensor inputs to recognize the user's locomotive intention and generate corresponding control commands for producing the desired locomotion. In this paper, we propose a learning-based shared model for predicting ankle-joint motion for different locomotion modes like level-ground walking, stair ascent, stair descent, slope ascent, and slope descent without the need to classify between them. Features extracted from hip and knee joint angular motion are used to continuously predict the ankle angles and moments using a Feed-Forward Neural Network-based shared model. We show that the shared model is adequate for predicting the ankle angles and moments for different locomotion modes without explicitly classifying between the modes. The proposed strategy shows the potential for devising a high-level controller for an intelligent prosthetic ankle that can adapt to different locomotion modes.