Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearned Uncertainty Calibration for Visual Inertial Localization
Paper and Code
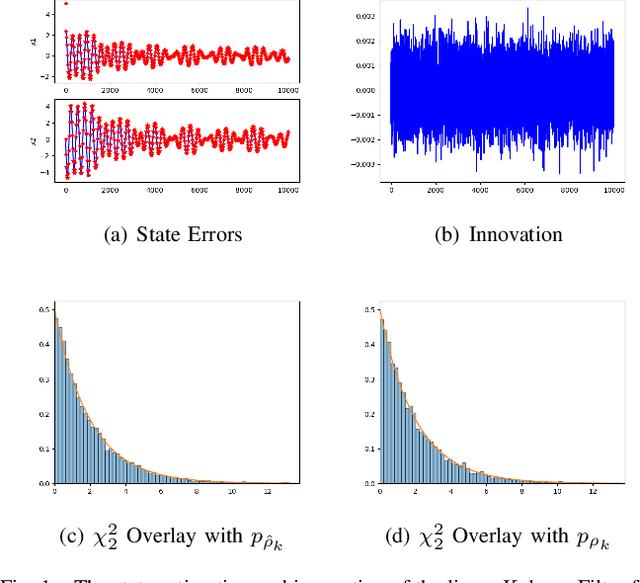
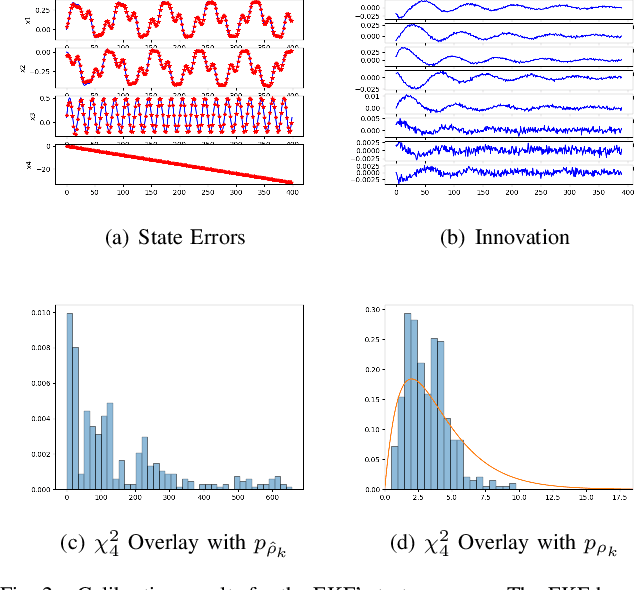
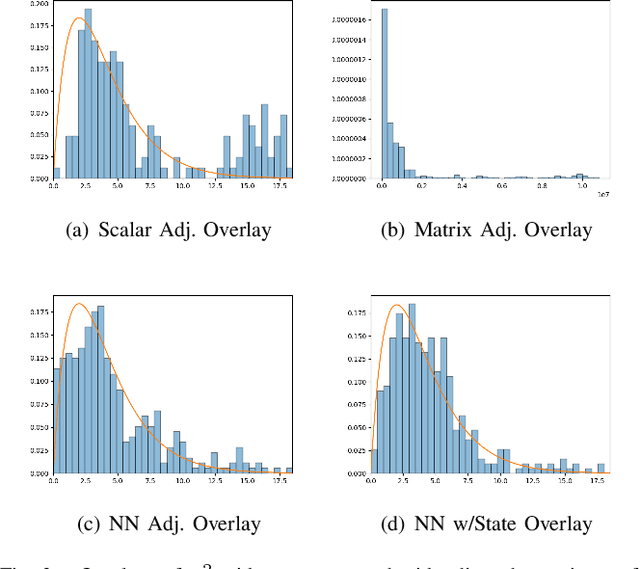
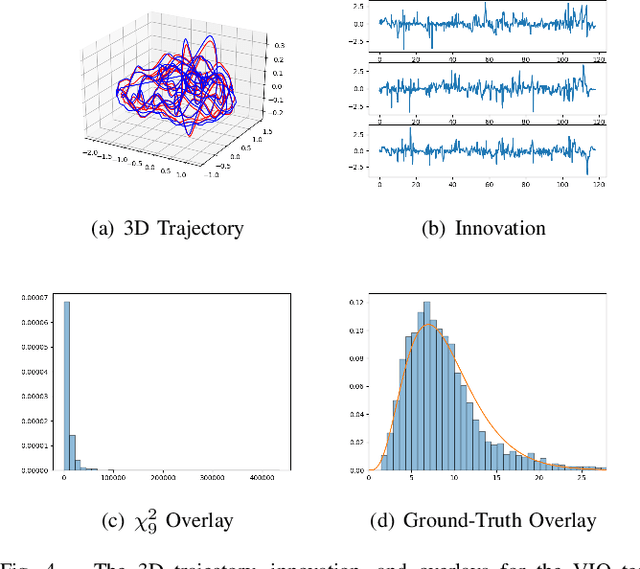
The widely-used Extended Kalman Filter (EKF) provides a straightforward recipe to estimate the mean and covariance of the state given all past measurements in a causal and recursive fashion. For a wide variety of applications, the EKF is known to produce accurate estimates of the mean and typically inaccurate estimates of the covariance. For applications in visual inertial localization, we show that inaccuracies in the covariance estimates are \emph{systematic}, i.e. it is possible to learn a nonlinear map from the empirical ground truth to the estimated one. This is demonstrated on both a standard EKF in simulation and a Visual Inertial Odometry system on real-world data.
* Published in International Conference on Robotics and Automation
(ICRA) 2021
View paper on