 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearn to Allocate Resources in Vehicular Networks
Paper and Code
Jul 30, 2019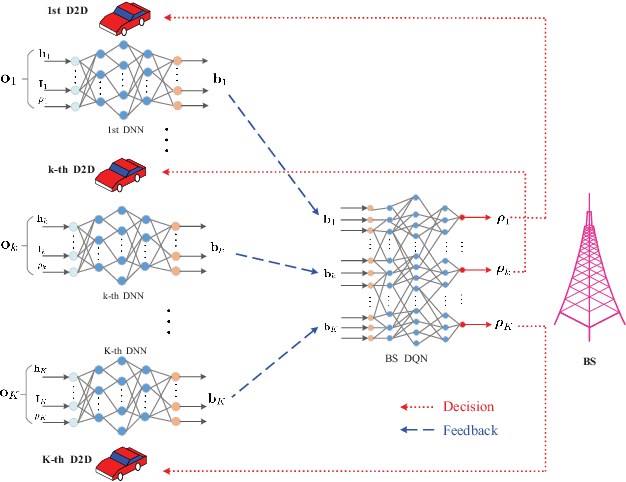



Resource allocation has a direct and profound impact on the performance of vehicle-to-everything (V2X) networks. Considering the dynamic nature of vehicular environments, it is appealing to devise a decentralized strategy to perform effective resource sharing. In this paper, we exploit deep learning to promote coordination among multiple vehicles and propose a hybrid architecture consisting of centralized decision making and distributed resource sharing to maximize the long-term sum rate of all vehicles. To reduce the network signaling overhead, each vehicle uses a deep neural network to compress its own observed information that is thereafter fed back to the centralized decision-making unit, which employs a deep Q-network to allocate resources and then sends the decision results to all vehicles. We further adopt a quantization layer for each vehicle that learns to quantize the continuous feedback. Extensive simulation results demonstrate that the proposed hybrid architecture can achieve near-optimal performance. Meanwhile, there exists an optimal number of continuous feedback and binary feedback, respectively. Besides, this architecture is robust to different feedback intervals, input noise, and feedback noise.