 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearn and Transfer Knowledge of Preferred Assistance Strategies in Semi-autonomous Telemanipulation
Paper and Code
Mar 07, 2020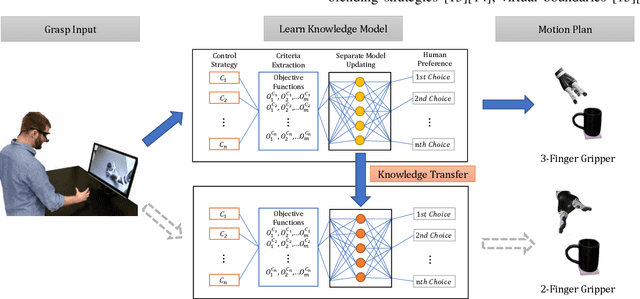
Increasing the autonomy level of a robot hand to accomplish remote object manipulation tasks faster and easier is a new and promising topic in teleoperation. Such semi-autonomous telemanipulation, however, is very challenging due to the physical discrepancy between the human hand and the robot hand, along with the fine motion constraints required for the manipulation task. To overcome these challenges, the robot needs to learn how to assist the human operator in a preferred/intuitive way, which must provide effective assistance that the operator needs yet still accommodate human inputs, so the operator feels in control of the system (i.e., not counter-intuitive to the operator). Toward this goal, we develop novel data-driven approaches to stably learn what assistance is preferred from high data variance caused by the ambiguous nature of human operators. To avoid an extensive robot-specific training process, methods to transfer this assistance knowledge between different robot hands are discussed. Experiments were conducted to telemanipulate a cup for three principal tasks: usage, move, and handover by remotely controlling a 3-finger gripper and 2-finger gripper. Results demonstrated that the proposed model effectively learned the knowledge of preferred assistance, and knowledge transfer between robots allows this semi-autonomous telemanipulation strategy to be scaled up with less training efforts.