 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLanguage-guided Task Adaptation for Imitation Learning
Paper and Code
Jan 24, 2023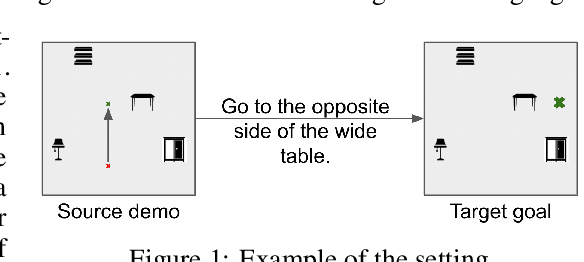



We introduce a novel setting, wherein an agent needs to learn a task from a demonstration of a related task with the difference between the tasks communicated in natural language. The proposed setting allows reusing demonstrations from other tasks, by providing low effort language descriptions, and can also be used to provide feedback to correct agent errors, which are both important desiderata for building intelligent agents that assist humans in daily tasks. To enable progress in this proposed setting, we create two benchmarks -- Room Rearrangement and Room Navigation -- that cover a diverse set of task adaptations. Further, we propose a framework that uses a transformer-based model to reason about the entities in the tasks and their relationships, to learn a policy for the target task