 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLanePtrNet: Revisiting Lane Detection as Point Voting and Grouping on Curves
Paper and Code
Mar 08, 2024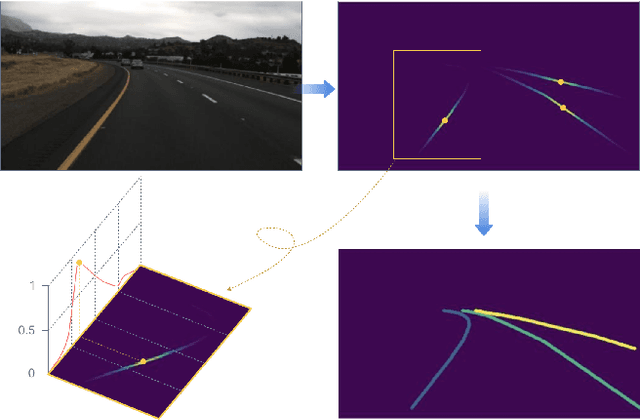
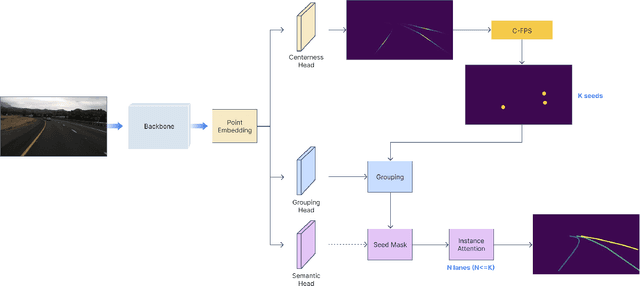
Lane detection plays a critical role in the field of autonomous driving. Prevailing methods generally adopt basic concepts (anchors, key points, etc.) from object detection and segmentation tasks, while these approaches require manual adjustments for curved objects, involve exhaustive searches on predefined anchors, require complex post-processing steps, and may lack flexibility when applied to real-world scenarios.In this paper, we propose a novel approach, LanePtrNet, which treats lane detection as a process of point voting and grouping on ordered sets: Our method takes backbone features as input and predicts a curve-aware centerness, which represents each lane as a point and assigns the most probable center point to it. A novel point sampling method is proposed to generate a set of candidate points based on the votes received. By leveraging features from local neighborhoods, and cross-instance attention score, we design a grouping module that further performs lane-wise clustering between neighboring and seeding points. Furthermore, our method can accommodate a point-based framework, (PointNet++ series, etc.) as an alternative to the backbone. This flexibility enables effortless extension to 3D lane detection tasks. We conduct comprehensive experiments to validate the effectiveness of our proposed approach, demonstrating its superior performance.