 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLagrangian Relaxation for MAP Estimation in Graphical Models
Paper and Code
Sep 28, 2007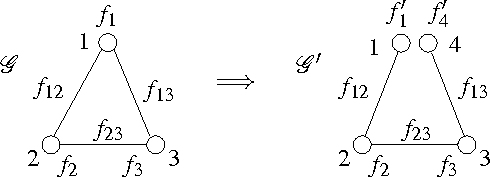
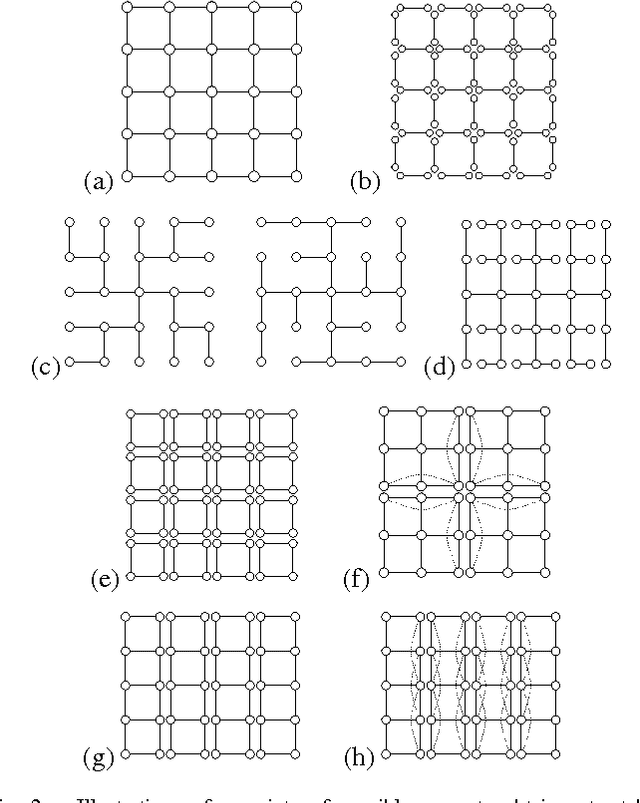
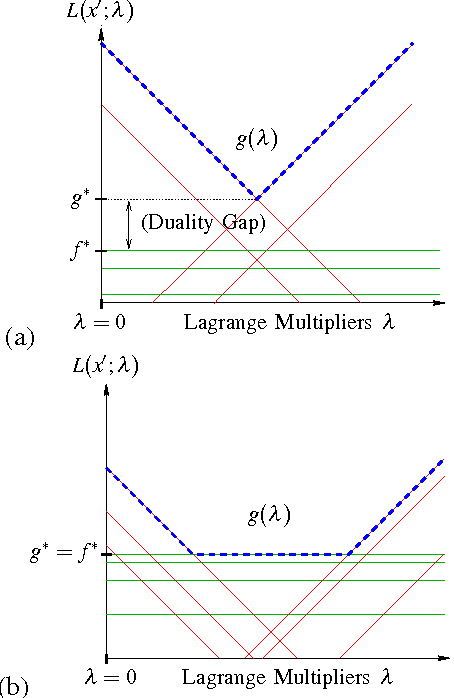
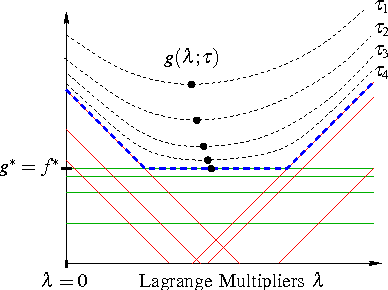
We develop a general framework for MAP estimation in discrete and Gaussian graphical models using Lagrangian relaxation techniques. The key idea is to reformulate an intractable estimation problem as one defined on a more tractable graph, but subject to additional constraints. Relaxing these constraints gives a tractable dual problem, one defined by a thin graph, which is then optimized by an iterative procedure. When this iterative optimization leads to a consistent estimate, one which also satisfies the constraints, then it corresponds to an optimal MAP estimate of the original model. Otherwise there is a ``duality gap'', and we obtain a bound on the optimal solution. Thus, our approach combines convex optimization with dynamic programming techniques applicable for thin graphs. The popular tree-reweighted max-product (TRMP) method may be seen as solving a particular class of such relaxations, where the intractable graph is relaxed to a set of spanning trees. We also consider relaxations to a set of small induced subgraphs, thin subgraphs (e.g. loops), and a connected tree obtained by ``unwinding'' cycles. In addition, we propose a new class of multiscale relaxations that introduce ``summary'' variables. The potential benefits of such generalizations include: reducing or eliminating the ``duality gap'' in hard problems, reducing the number or Lagrange multipliers in the dual problem, and accelerating convergence of the iterative optimization procedure.