 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLAFFNet: A Lightweight Adaptive Feature Fusion Network for Underwater Image Enhancement
Paper and Code
May 05, 2021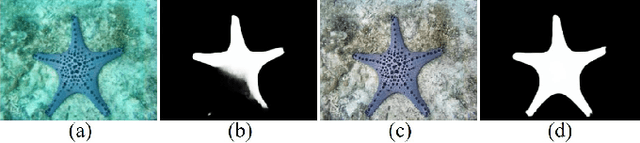
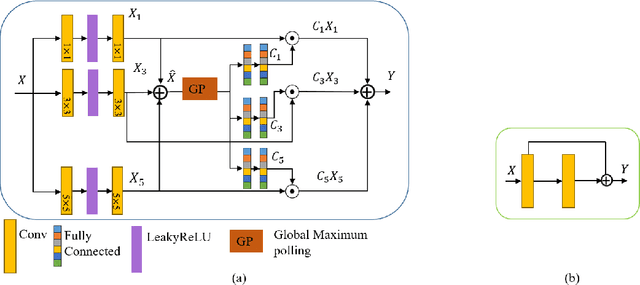
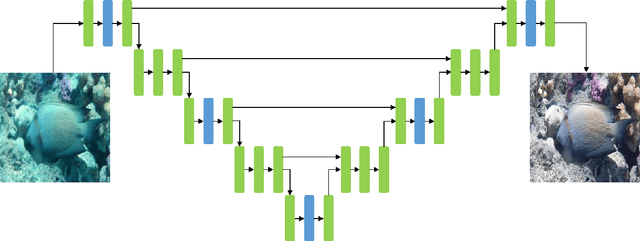
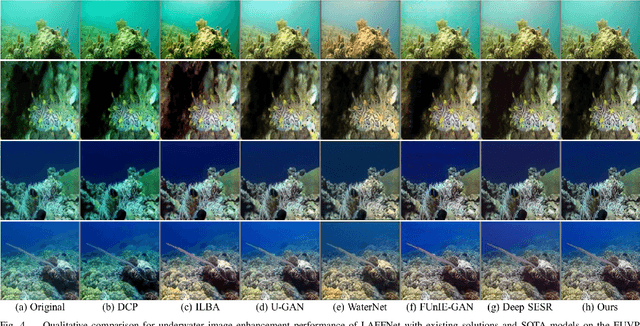
Underwater image enhancement is an important low-level computer vision task for autonomous underwater vehicles and remotely operated vehicles to explore and understand the underwater environments. Recently, deep convolutional neural networks (CNNs) have been successfully used in many computer vision problems, and so does underwater image enhancement. There are many deep-learning-based methods with impressive performance for underwater image enhancement, but their memory and model parameter costs are hindrances in practical application. To address this issue, we propose a lightweight adaptive feature fusion network (LAFFNet). The model is the encoder-decoder model with multiple adaptive feature fusion (AAF) modules. AAF subsumes multiple branches with different kernel sizes to generate multi-scale feature maps. Furthermore, channel attention is used to merge these feature maps adaptively. Our method reduces the number of parameters from 2.5M to 0.15M (around 94% reduction) but outperforms state-of-the-art algorithms by extensive experiments. Furthermore, we demonstrate our LAFFNet effectively improves high-level vision tasks like salience object detection and single image depth estimation.