 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeL4KDE: Learning for KinoDynamic Tree Expansion
Paper and Code
Mar 02, 2022

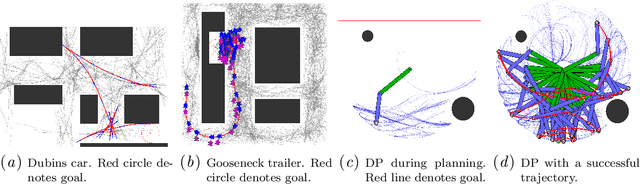
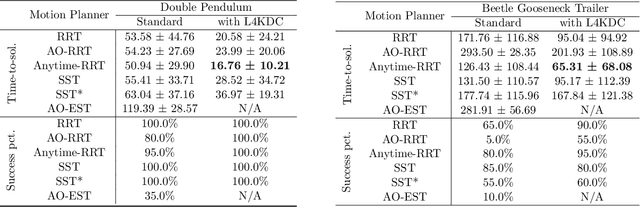
We present the Learning for KinoDynamic Tree Expansion (L4KDE) method for kinodynamic planning. Tree-based planning approaches, such as rapidly exploring random tree (RRT), are the dominant approach to finding globally optimal plans in continuous state-space motion planning. Central to these approaches is tree-expansion, the procedure in which new nodes are added into an ever-expanding tree. We study the kinodynamic variants of tree-based planning, where we have known system dynamics and kinematic constraints. In the interest of quickly selecting nodes to connect newly sampled coordinates, existing methods typically cannot optimise to find nodes which have low cost to transition to sampled coordinates. Instead they use metrics like Euclidean distance between coordinates as a heuristic for selecting candidate nodes to connect to the search tree. We propose L4KDE to address this issue. L4KDE uses a neural network to predict transition costs between queried states, which can be efficiently computed in batch, providing much higher quality estimates of transition cost compared to commonly used heuristics while maintaining almost-surely asymptotic optimality guarantee. We empirically demonstrate the significant performance improvement provided by L4KDE on a variety of challenging system dynamics, with the ability to generalise across different instances of the same model class, and in conjunction with a suite of modern tree-based motion planners.