 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKnowledge Graphs of Driving Scenes to Empower the Emerging Capabilities of Neurosymbolic AI
Paper and Code
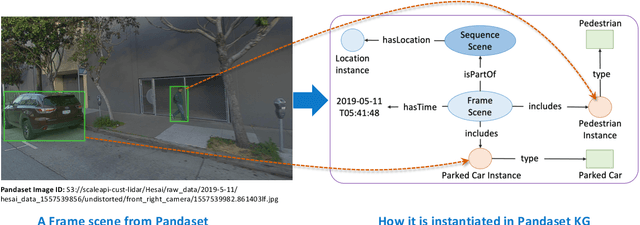
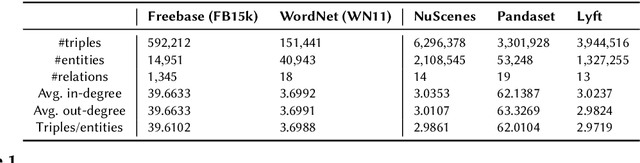
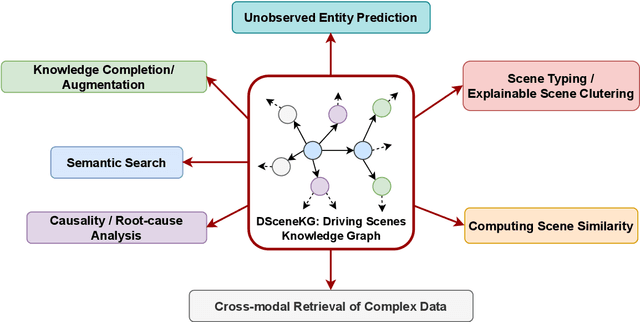
In the era of Generative AI, Neurosymbolic AI is emerging as a powerful approach for tasks spanning from perception to cognition. The use of Neurosymbolic AI has been shown to achieve enhanced capabilities, including improved grounding, alignment, explainability, and reliability. However, due to its nascent stage, there is a lack of widely available real-world benchmark datasets tailored to Neurosymbolic AI tasks. To address this gap and support the evaluation of current and future methods, we introduce DSceneKG -- a suite of knowledge graphs of driving scenes built from real-world, high-quality scenes from multiple open autonomous driving datasets. In this article, we detail the construction process of DSceneKG and highlight its application in seven different tasks. DSceneKG is publicly accessible at: https://github.com/ruwantw/DSceneKG