 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKNODE-MPC: A Knowledge-based Data-driven Predictive Control Framework for Aerial Robots
Paper and Code
Sep 10, 2021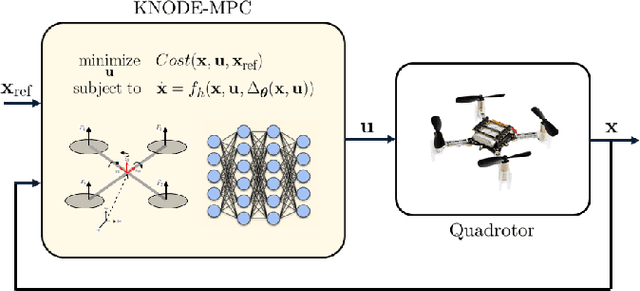

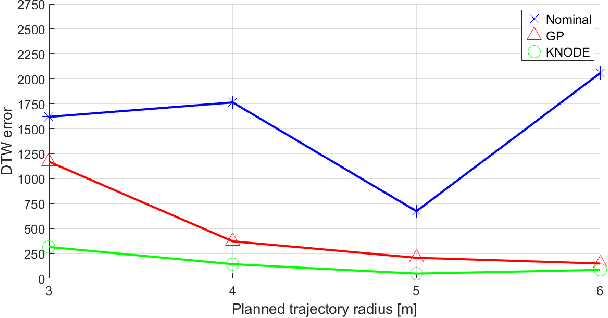
In this work, we consider the problem of deriving and incorporating accurate dynamic models for model predictive control (MPC) with an application to quadrotor control. MPC relies on precise dynamic models to achieve the desired closed-loop performance. However, the presence of uncertainties in complex systems and the environments they operate in poses a challenge in obtaining sufficiently accurate representations of the system dynamics. In this work, we make use of a deep learning tool, knowledge-based neural ordinary differential equations (KNODE), to augment a model obtained from first principles. The resulting hybrid model encompasses both a nominal first-principle model and a neural network learnt from simulated or real-world experimental data. Using a quadrotor, we benchmark our hybrid model against a state-of-the-art Gaussian Process (GP) model and show that the hybrid model provides more accurate predictions of the quadrotor dynamics and is able to generalize beyond the training data. To improve closed-loop performance, the hybrid model is integrated into a novel MPC framework, known as KNODE-MPC. Results show that the integrated framework achieves 73% improvement in simulations and more than 14% in physical experiments, in terms of trajectory tracking performance.